10. From the Device menu, select Open Connection.
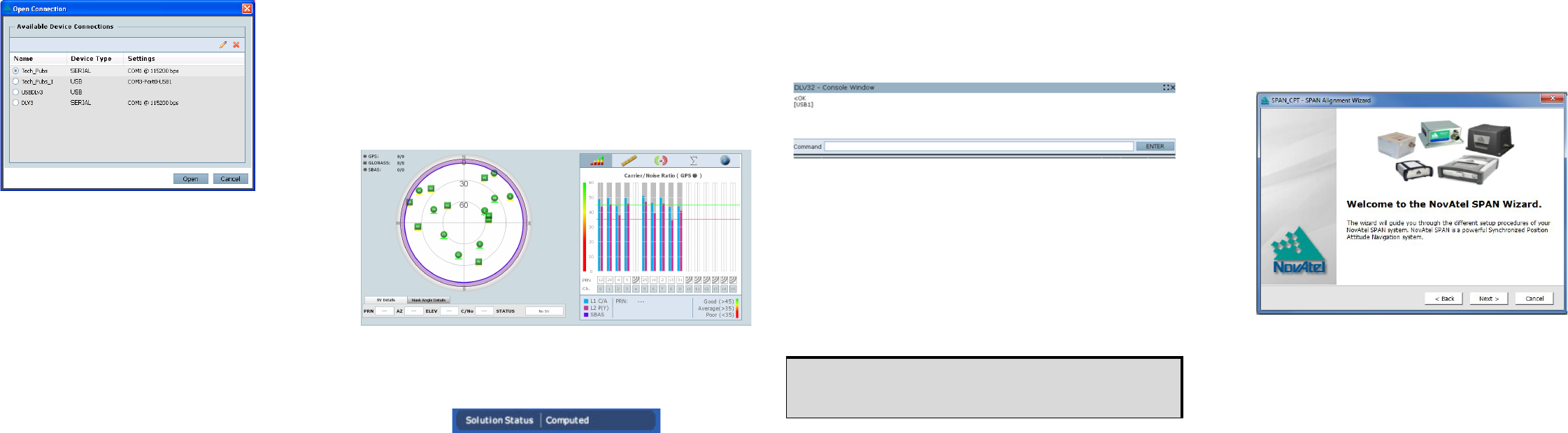
11. Select the new configuration from the Available Device
Connections area of the Open dialog and click the Open
button.
Connect establishes a communication session with the
receiver and displays the progress. Once connected, the
progress box disappears and several windows open,
including the Console window. Connect is now ready for use
to view status information, enter commands or log data.
USING NOVATEL CONNECT
Connect provides access to key information about your receiver
and its position. The information is displayed in windows
accessed from the View menu. For example, select Position
Window from the View menu to display the position solution of
the receiver. To show details of the GNSS and geostationary
(SBAS) satellites being tracked, select the Tracking Status
Window from the View menu. Select Help from the main menu
for more details on Connect, its windows and features.
DETERMINING WHEN THE POSITION IS VALID
When the receiver has a valid position, the Solution Status field
in the Connect Position window shows Computed:
ENTERING COMMANDS
The SPAN-CPT uses a comprehensive command interface.
Commands can be sent to the receiver using the Console
window in Connect, which is opened from the View menu. Enter
commands in the text box at the bottom of the Console window.
The OEMV Family Quick Reference Guide, provided on the CD
and available on the NovAtel website, provides comprehensive
information about available commands. The SPAN-CPT User
Manual provides information on a subset of these commands; in
particular, the ones commonly used on the SPAN-CPT.
SAVECONFIG COMMAND
If you change the configuration of a function and want to save
the new settings for your next session, use the SAVECONFIG
command.
CONFIGURE SPAN-CPT USING CONNECT
Follow these steps to enable INS as part of the SPAN system
using the NovAtel Connect software utility:
1. Select Wizards | SPAN Alignment from the NovAtel Connect
toolbar.
This wizard takes you through the steps to complete a
coarse or fast alignment and configure the receiver port that
is connected to the IMU, to accept IMU data.
Configuration for Alignment
The default alignment method for a SPAN-CPT is the fast or
kinematic alignment. The fast or kinematic alignment is
performed by estimating the attitude from the GNSS velocity
vector and injecting it into the SPAN filter as the initial system
attitude. For this estimate to be made, the vehicle must move
faster than 1.15 m/s.
CONFIGURE GNSS
Depending on the accuracy of the solution required, the GNSS
can be augmented with a number of correction sources including
SBAS, L-Band and RTK (RTCA, RTCM, RTCM V3 and CMR).
Refer to the OEMV Installation and Operation Manual /
ProPak-V3 Quick Start, for SBAS, L-Band or RTK setup and
operation.
When using Connect to configure your receiver, ensure all
of the graphical windows are closed before you issue the
SAVECONFIG command.




