



















Chapter 2 NI-DSP Analysis VI Reference
NI-DSP SRM for LabVIEW for Windows 2-13 Part 3: NI-DSP Function Reference
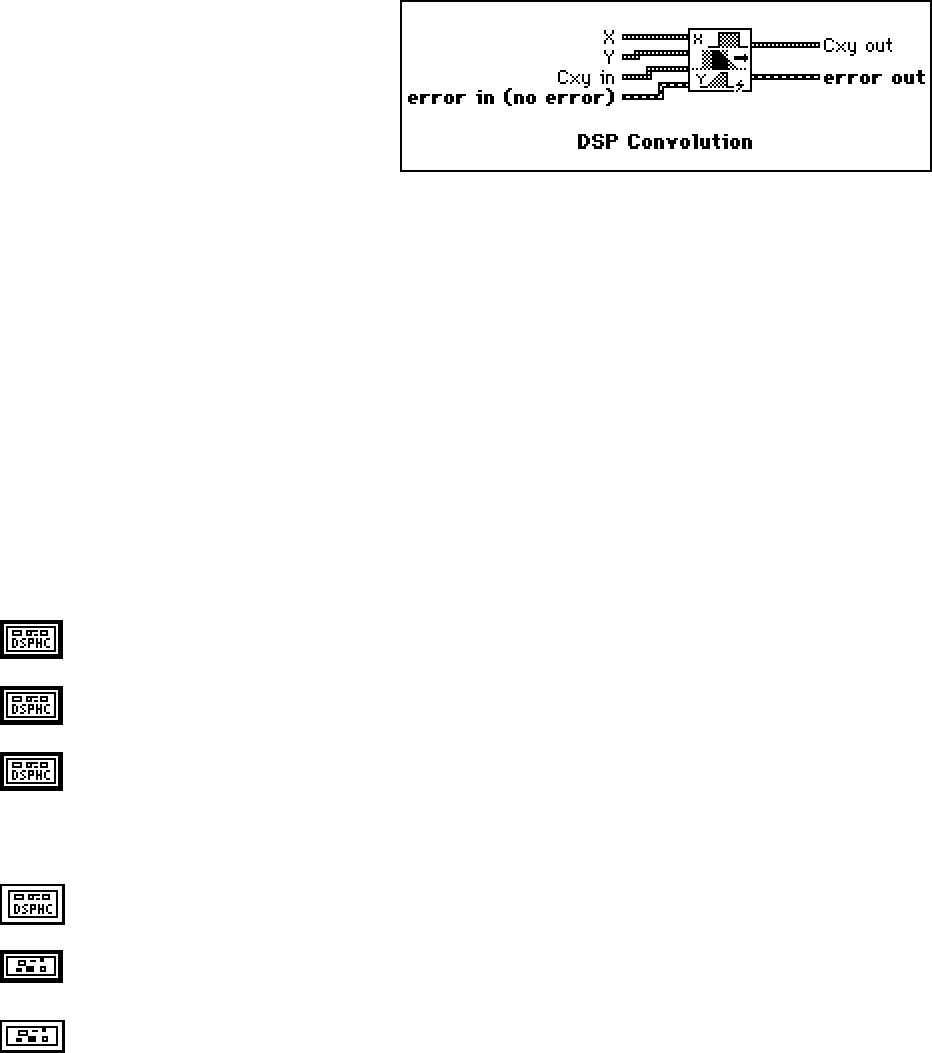
DSP Convolution
Computes the convolution of the input
sequences X and Y. The convolution Cxy(t), of
the signals x(t) and y(t), is defined as follows:
Cxy(t) = x(t)
*
y(t) = ∫
-∞
∞
x(τ) y(t-τ) dτ ,
where the symbol
*
denotes convolution.
For the discrete implementation of the convolution, let Cxy represent the output sequence X * Y, n be the number of
elements in the input sequence X, and m be the number of elements in the input sequence Y. Assuming that indexed
elements of X and Y that lie outside their range are zero,
x
i
= 0, i < 0 or i ≥ n
and
y
j
= 0, j < 0 or j ≥ m,
then you obtain the elements of Cxy using:
Cxy
i
=
∑
k = 0
n-1
x
k
y
i-k
for i = 0, 1, 2, …, size-1 ,
size = n + m - 1,
where size is the total number of elements in the output sequence X * Y.
X is a DSP Handle Cluster that indicates the memory buffer on the DSP board that contains the input
signal array X.
Y is a DSP Handle Cluster that indicates the memory buffer on the DSP board that contains the input
signal array Y.
Cxy in is a DSP Handle Cluster that indicates the memory buffer on the DSP board that will contain the
convolution of X with Y.
Note: The size of Cxy in must be (n+m-1) elements long. n is the size of X, m is the size of Y. You
cannot perform the operation in place.
Cxy out is a DSP Handle Cluster that is identical to the Cxy in but with the convolution of X and Y
already stored in the memory buffer on the DSP board.
error in (no error) contains the error information from a previous VI. If an error occurs, it is passed out
error out and no other calls are made.
error out contains the error information for this call.