



















XR-P740M, XR-P640M, XR-P34()M
xR.-P7 40, XR-P64(),
XR-P340
Code Key Name Function
in Test Mode Explanation
Lr<<
MANUAL//
TRACK
SEARCH
REV
Carriage reverse
(inwards)
Moves the
pickup position
toward the inner diameter o{ the
disc. When this key
is
pressed
with the tracking servo in a
closed loop, the tracking
servo automatically
goes
into an
open loop, Sitrce the motor does
not automatically stop at
tlre mechanical end
point
in test mode, be
careful
with this
operation.
MANUAI-//
TRACK
SEARCH
FWD
Caniage
forward
(outwards)
Moves the
pickup
position
tov/ard the outer diameter of the
disc. When this key is
pressed
with the tracking servo
in
a
closed
loop,
the
tracking servo automatically
goes
into an
open loop. Since the
motor does not automatically stop at
the mechanical end
point
in test mode, be careful with this
operahon.
E
STOP Stop
Initializes and the disc rotation stops.
The
pickup
and disc remain where they are when this key is
oressed.
A
EJECT CD
magaz ine eiect
(For
CD
Multi)
Stores Disc I in the CD magazine, then ejects the CD
magazine. However, even tlough the CD magazine is
ejected,
the
pickup
does not return to the
park position.
Eveo if the CD magazine
is mounted
again, the
pickup
remains where
it is.
A
OPEN/,CLOSE Disc tray open,,'close
(For
CD Single)
Open/close the disc tray. This key is a toggle key and
open/close
tray altenately.
Pressing this key when the disc
is
turning
stops
the disc,
then opens the tray.
This key operation does not affect the
position
of the
pickup.
Note: When inserting
the magazine, disc 7 of the
magazine is
loaded automatically.
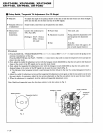
lHow
to
playback
a disc
in
test
model
In test mode, since
the
servos operate independently,
playing
back a disc
requires
that
you
operate
the keys in the
correct order to close
the servos.
Here is
the
key
operation sequence for
playing
back a disc in test mode.
I
DOLBY
NR
Lights up the laser diode and closes the focus servo.
Starts the
spindle motor
and closes
the spindle servo.
Closes the tracking
servo.
Wait at least 2-3 seconds between each of these operations.
0
i-- mr I
+
t r'- r.--l
t-Jl