



















20 SPAN-CPT User Manual Rev 8
Chapter 3 SPAN-CPT Operation
Before operating the SPAN-CPT system, ensure that the installation and set up instructions in Chapter 2,
SPAN-CPT Installation on page 13 were completed.
Use the NovAtel Connect software to configure receiver settings and to monitor data in real time,
between a rover SPAN-CPT system and base station.
SPAN-CPT system output is compatible with post-processing software from NovAtel's Waypoint Products
Group. For information about Waypoint, visit our Web site at www.novatel.com/products/software/
waypoint-products/.
3.1 Definition of Reference Frames Within SPAN
The reference frames most frequently used throughout this manual are:
• Local Level Frame
•SPAN Body Frame
• Enclosure Frame
• Vehicle Frame
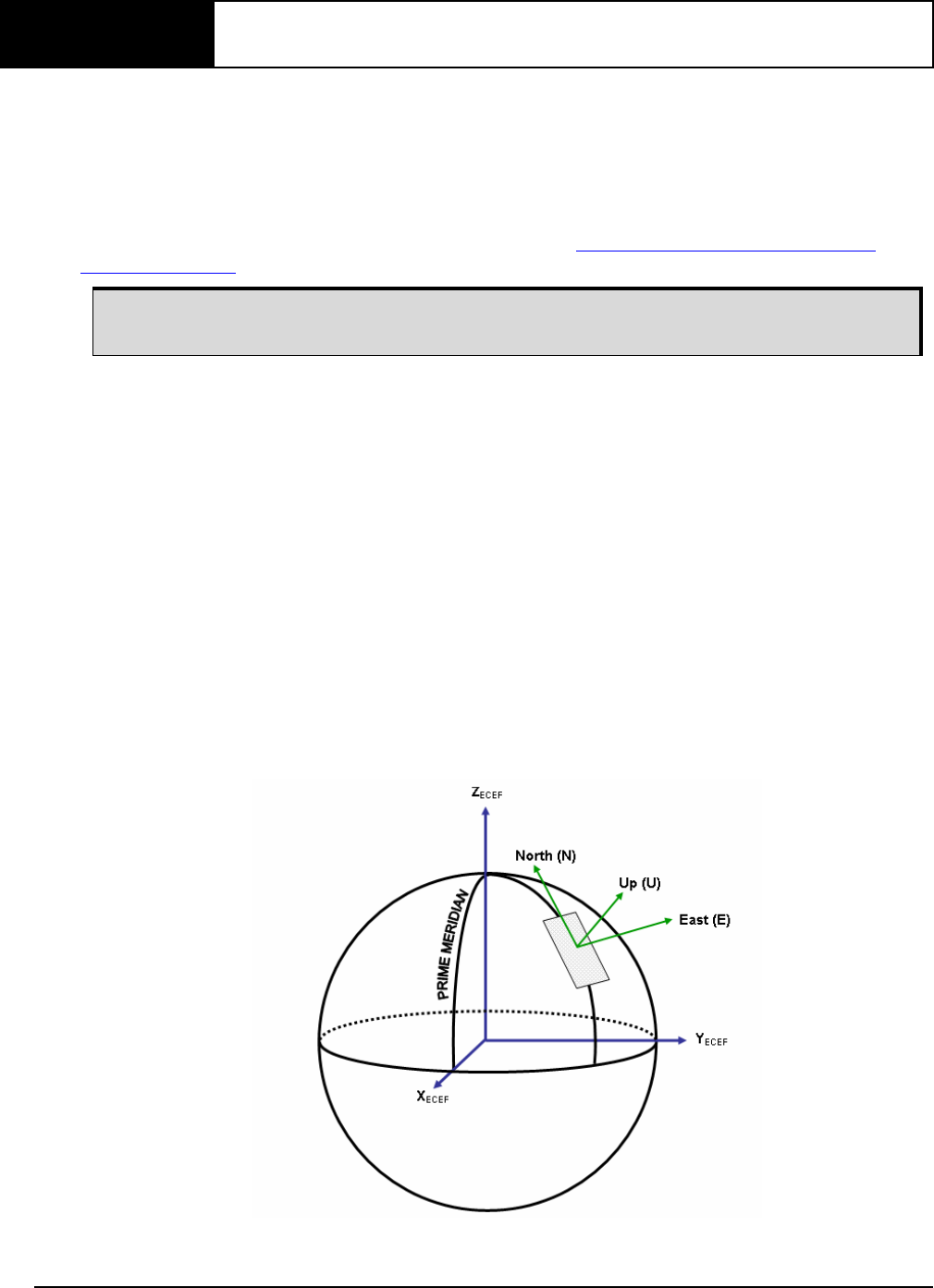
3.1.1 Local Level Frame
The definition of the local level coordinate frame is as follows:
• z-axis pointing up (aligned with gravity)
• y-axis pointing north
• x-axis pointing east
Figure 8: Local Level Frame (ENU)
Ensure the computer’s Control Panel Power Settings are not set to go into Hibernate or
Standby modes. Data is lost if one of these modes occur during a logging session.