

















5 - 8
5. PARAMETERS
Class No. Symbol Name and function
Initial
value
Unit
Setting
range
Control
mode
Internal speed command 2
Used to set speed 2 of internal speed commands.
S9SC2
Internal speed limit 2
Used to set speed 2 of internal speed limits.
500 r/min
0 to
instan-
taneous
permi-
ssible
speed
T
Internal speed command 3
Used to set speed 3 of internal speed commands.
S10 SC3
Internal speed limit 3
Used to set speed 3 of internal speed limits.
1000 r/min
0 to
instan-
taneous
permi-
ssible
speed
T
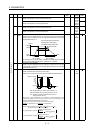
11 STA
Acceleration time constant
Used to set the acceleration time required to reach the rated speed
from 0r/min in response to the analog speed command and internal
speed commands 1 to 7.
Tim
e
Parameter
No.12 setting
Parameter
No.11 setting
Zero
speed
Rated
speed
Speed
If the preset speed command is
lower than the rated speed,
acceleration/deceleration time
will be shorter.
For example for the servo motor of 3000r/min rated speed, set 3000
(3s) to increase speed from 0r/min to 1000r/min in 1 second.
0
12 STB
Deceleration time constant
Used to set the deceleration time required to reach 0r/min from the
rated speed in response to the analog speed command and internal
speed commands 1 to 7.
0
ms 0
to
20000
S
T
Basic parameters
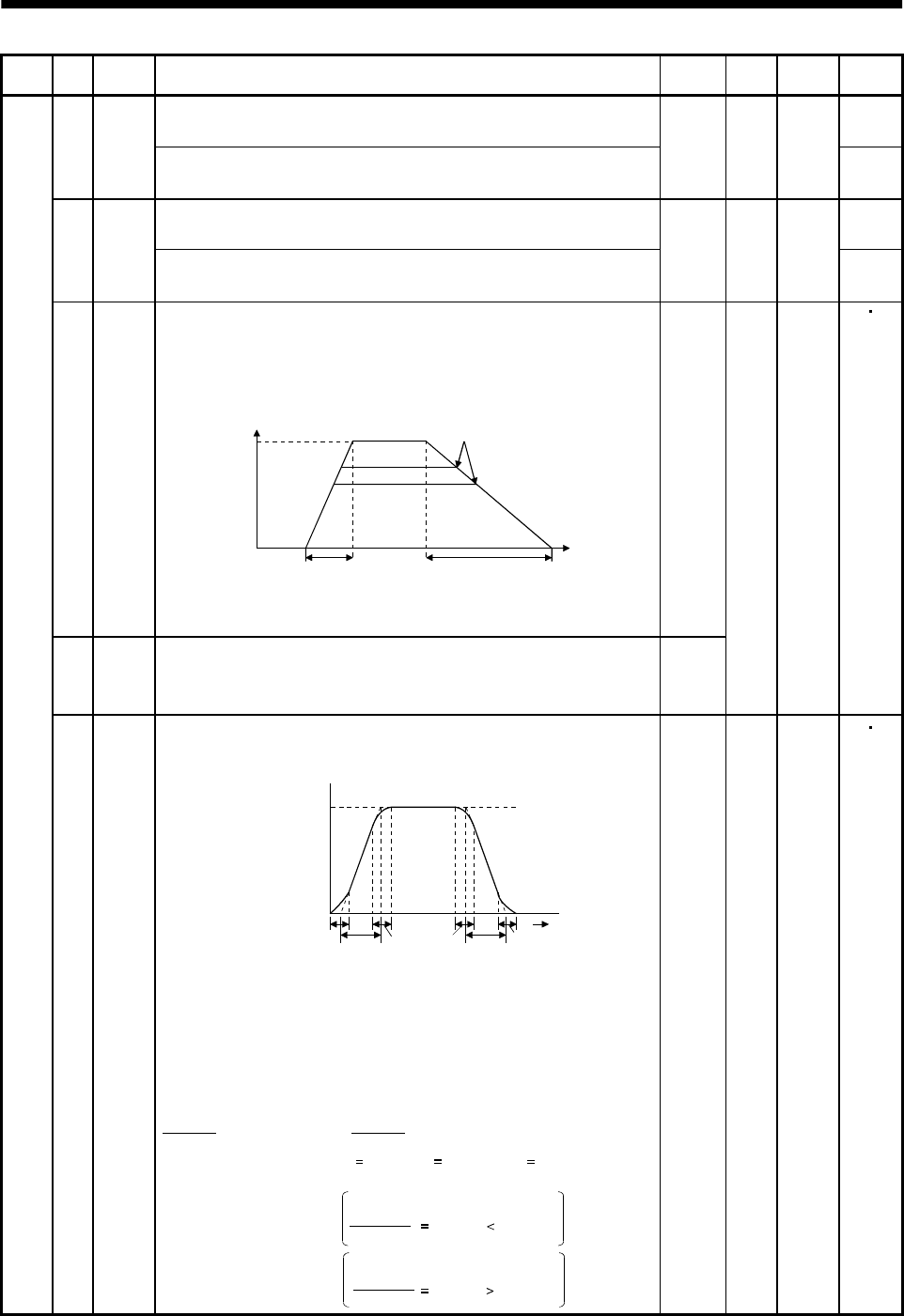
13 STC S-pattern acceleration/deceleration time constant
Used to smooth start/stop of the servo motor.
Set the time of the arc part for S-pattern acceleration/deceleration.
STA: Acceleration time constant (parameter No.11)
STB: Deceleration time constant (parameter No.12)
STC: S-pattern acceleration/deceleration time con-
stant (parameter No.13)
Speed command
Servo motor
Speed
0r/min
STC
STA STC
STC STB
STC
Time
Long setting of STA (acceleration time constant) or STB (deceleration time
constant) may produce an error in the time of the arc part for the setting of the
S-pattern acceleration/deceleration time constant.
The upper limit value of the actual arc part time is limited by
At the setting of STA 20000, STB 5000 and STC 200,
the actual arc part times are as follows:
for acceleration or by for deceleration.
(Example)
During acceleration: 100[ms]
2000000
20000
100[ms] 200[ms].
Limited to 100[ms] since
During deceleration: 200[ms]
2000000
5000
400[ms] 200[ms].
200[ms] as set since
2000000
STA
2000000
STB
0ms0
to
1000
S
T