

















3 - 21
3. SIGNALS AND WIRING
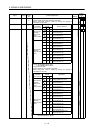
Control
mode
Signal Symbol
Connec-
tor pin
No.
Functions/Applications
I/O
division
PST
Encoder Z-phase
pulse
(Open collector)
OP CN1A
14
Outputs the zero-point signal of the encoder. One pulse is output
per servo motor revolution. OP and LG are connected when the
zero-point position is reached. (Negative logic)
The minimum pulse width is about 400
s. For home position
return using this pulse, set the creep speed to 100r/min. or less.
DO-2
Encoder A-phase
pulse
(Differential line
driver)
LA
LAR
CN1A
6
CN1A
16
Encoder B-phase
pulse
(Differential line
driver)
LB
LBR
CN1A
7
CN1A
17
Outputs pulses per servo motor revolution set in parameter No.
27 in the differential line driver system. In CCW rotation of the
servo motor, the encoder B-phase pulse lags the encoder A-phase
pulse by a phase angle of
/2.
The relationships between rotation direction and phase difference
of the A- and B-phase pulses can be changed using parameter No.
54.
DO-2
Encoder Z-phase
pulse
(Differential line
driver)
LZ
LZR
CN1A
5
CN1A
15
The same signal as OP is output in the differential line driver
system.
DO-2
Analog monitor 1 MO1 CN3
4
Used to output the data set in parameter No.17 to across MO1-LG
in terms of voltage. Resolution 10 bits
Analog
output
Analog monitor 2 MO2 CN3
14
Used to output the data set in parameter No.17 to across MO2-LG
in terms of voltage. Resolution 10 bits
Analog
output
(3) Communication
POINT
Refer to Chapter 14 for the communication function.
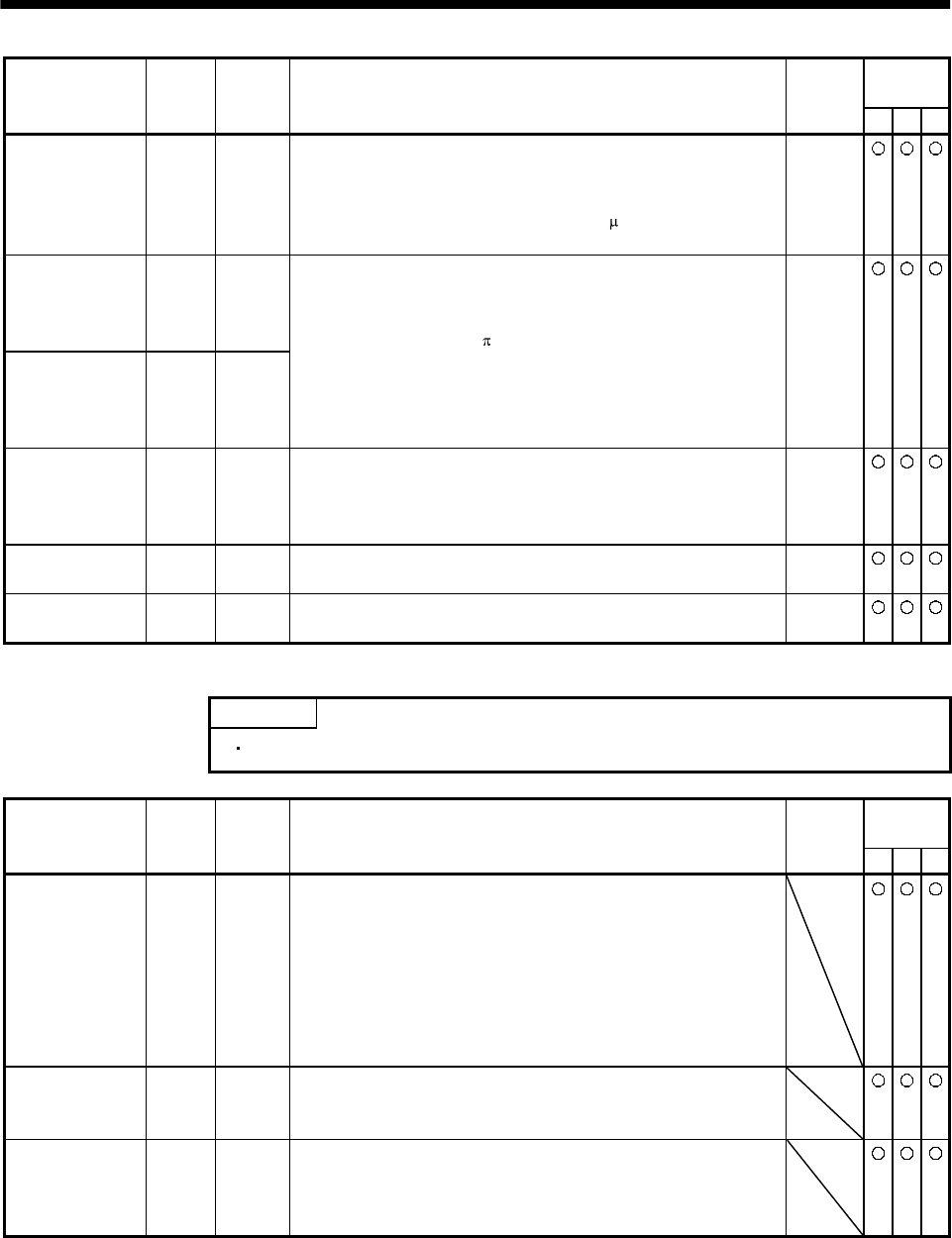
Control
mode
Signal Symbol
Connec-
tor pin
No.
Functions/Applications
I/O
division
PST
RS-422 I/F SDP
SDN
RDP
RDN
CN3
9
CN3
19
CN3
5
CN3
15
RS-485 and RS-232C functions cannot be used together.
Choose either one in parameter No. 16.
RS-422
termination
TRE CN3
10
Termination resistor connection terminal of RS-422 interface.
When the servo amplifier is the termination axis, connect this
terminal to RDN (CN3-15).
RS-232C I/F RXD
TXD
CN3
2
CN3
12
RS-485 and RS-232C functions cannot be used together.
Choose either one in parameter No. 16.