



















3 - 8
3. SIGNALS AND WIRING
3.2.2 Signal explanations
For the I/O interfaces (symbols in I/O column in the table), refer to Section 3.4.2.
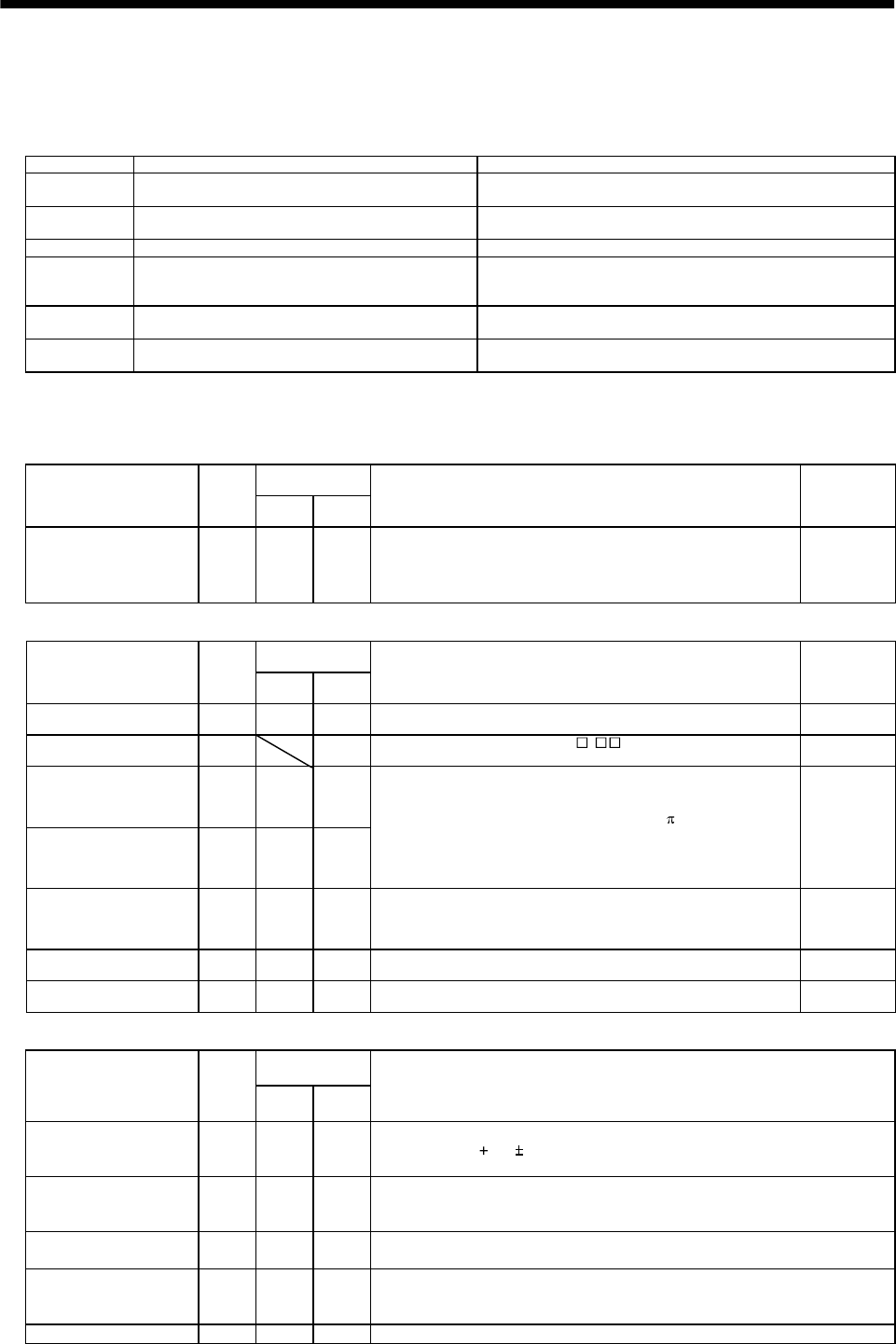
(1) Connector applications
Connector Name Function/Application
CN1A Connector for bus cable from preceding axis.
Used for connection with the controller or preceding-axis
servo amplifier.
CN1B Connector for bus cable to next axis
Used for connection with the next-axis servo amplifier or
for connection of the termination connector.
CN2 Encoder connector Used for connection with the servo motor encoder.
CN3
Communication connector
(I/O signal connector)
Used for connection with the personal computer.
Serves as an I/O signal connector when the personal
computer is not used.
(Note) CN4 Analog monitor output connector
Used to output analog monitor 1 (M01) and analog monitor
2 (M02).
(Note) CON2 IO signal connector
Used to input a forced stop and output the dynamic brake
interlock(DR), the electromagnetic brake interlock
Note. These connectors are exclusive to the MR-J2S-11KB or more.
(2) I/O signals
(a) Input signal
Connector Pin
No.
Signal S
y
mbol
7kw
or less
11kw
or more
Function/Application I/O Division
Forced stop EM1
CN3
20
CON2
2
Turnin
g
off EM1 puts the servo motor in a forced stop status,
in which the servo is switched off and the d
y
namic brake is
operated to stop the servo motor.
Turn on EM1 in the forced stop status to reset the forced stop
status.
DI-1
(b) Output signals
Connector Pin
No.
Signal S
y
mbol
7kw
or less
11kw
or more
Function/Application I/O Division
Electromagnetic brake
interlock
MBR
CN3
13
CON2
3
In the servo-off or alarm status, MBR turns off.
DO-1
Dynamic brake
interlock
DB
CON2
4
When usin
g
this si
g
nal, set 1
in the parameter No. 2.
When the dynamic brake is operated, DB turns off.
DO-1
Encoder A-phase pulse
(Differential line driver)
LA
LAR
CN3
6
CN3
16
CN3
6
CN3
16
Encoder B-phase pulse
(Differential line driver)
LB
LBR
CN3
7
CN3
17
CN3
7
CN3
17
Outputs pulses per servo motor revolution set in parameter
No.38 in the differential line driver s
y
stem. In CCW rotation
of the servo motor, the encoder B-phase pulse la
g
s the
encoder A-phase pulse by a phase angle of
/2.
DO-2
Encoder Z-phase pulse
(Differential line driver)
LZ
LZR
CN3
8
CN3
18
CN3
8
CN3
18
The zero-phase si
g
nal of the encoder is output in the
differential line driver system.
DO-2
Analog monitor 1 MO1
CN3
4
CN4
1
Used to output the data set in parameter No.22 to across
MO1-LG in terms of voltage. Resolution 10 bits
Analog
output
Analog monitor 2 MO2
CN3
14
CN4
2
Used to output the data set in parameter No.22 to across
MO2-LG in terms of voltage. Resolution 10 bits
Analog
output
(c) Power supply
Connector Pin
No.
Signal Symbol
7kw
or less
11kw
or more
Function/Application
Internal power output
for interface
VDD
CN3
10
CON2
15
Driver power output terminal for digital interface.
Used to output
24V 10% to across VDD-COM. Connect with COM.
Permissible current: 80mA
Power input for digital
interface
COM
CN3
5
CON2
18
Driver power input terminal for digital interface.
Used to input 24VDC (200mA or more) for input interface.
Connect with VDD.
Common for digital
interface
SG
CN3
3
CON2
1
Common terminal to VDD and COM. Pins are connected internally.
Separated from LG.
Control common LG
CN3
1
11
CN4
4
Common terminal to MO1 and MO2.
Shield SD Plate Plate Connect the external conductor of the shield cable.