


















5 - 16
5. PARAMETERS
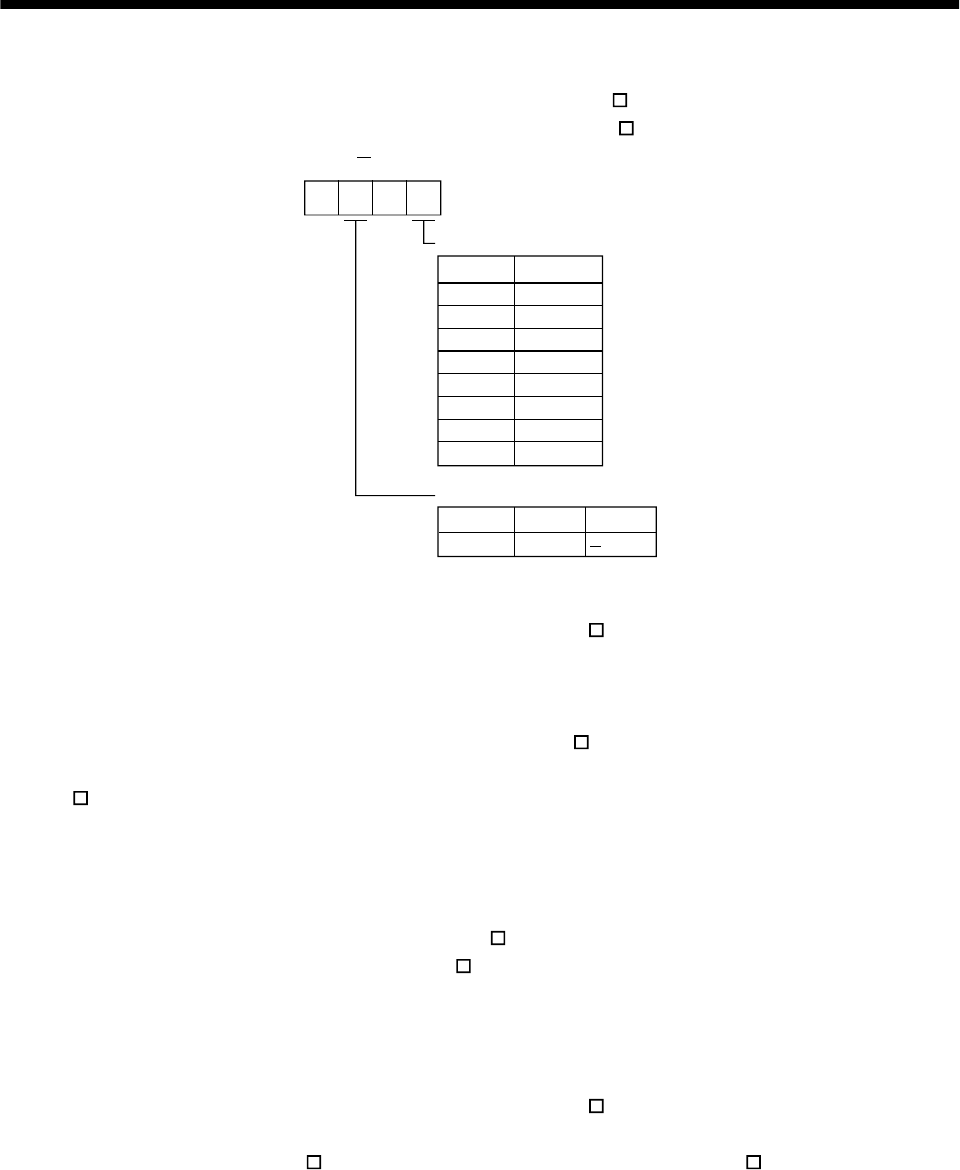
(4) Machine resonance suppression filter 1 (parameter No. 18)
The settings of this parameter were changed for the MR-J2S-
B. If the peripheral software of the
servo system controller is not compatible with the MR-J2S-
B, the parameter settings are as
indicated below. The notch depth is
40dB.
0
0
1
2
3
4
5
6
7
00
Notch frequency selection
Set value Frequency
4500
Invalid
2250
1500
1125
900
750
642.9
Notch depth selection
Set value Depth Gain
0 Deep 40dB
(5) In-position range (parameter No. 20)
The setting of this parameter was changed for the MR-J2S-
B. The setting unit was changed from
the conventional input pulse unit to the feedback pulse unit. For details, refer to Section 5.2.
(6) Analog monitor output (parameter No. 22)
The setting of this parameter was changed for the MR-J2S-
B. "Bus voltage" is a new choice, but you
cannot select it if the peripheral software of the servo system controller is not compatible with the MR-
J2S-
B.
Also, the droop pulse output is the encoder resolution unit of the actual motor. For details, refer to
Section 5.3.
(7) Low-pass filter/adaptive vibration suppression control (parameter No. 25)
This parameter was newly added to the MR-J2S-
B. If the peripheral software of the servo system
controller is not compatible with the MR-J2S-
B, this parameter setting cannot be changed. Hence,
the low-pass filter is "valid" and the adaptive vibration suppression control is "invalid". For details,
refer to Sections 7.3 and 7.4.
(8) Error excessive alarm level (parameter No. 31)
The setting of this parameter was changed for the MR-J2S-
B. The setting unit was changed from
conventional [k pulse] to [0.1rev]. If the peripheral software of the servo system controller is not
compatible with the MR-J2S-
B, the unit is set as [0.1rev] to the MR-J2S- B even when the on-
screen setting unit is [k pulse]. For details, refer to Section 5.2.