


















6 - 2
6. GENERAL GAIN ADJUSTMENT
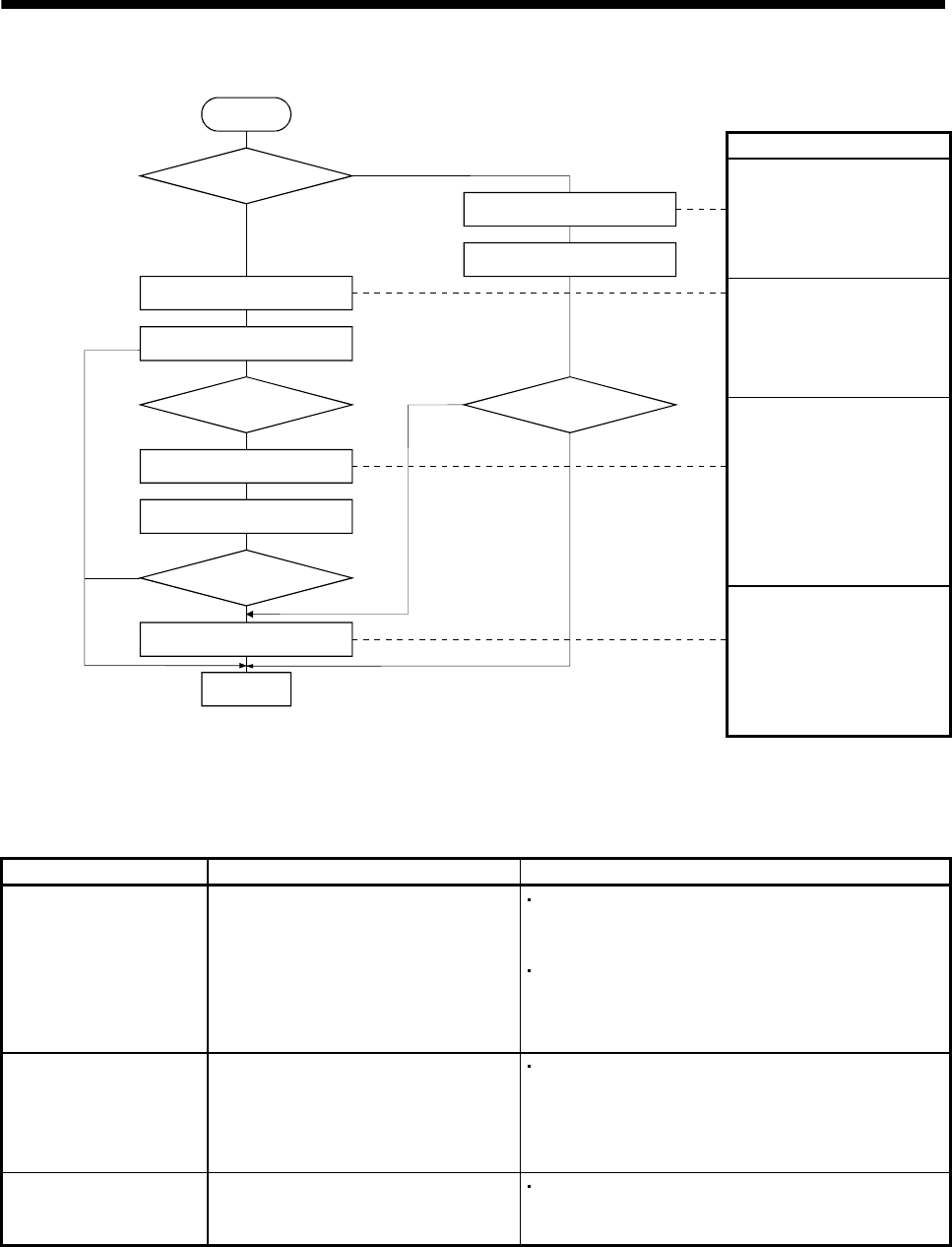
(2) Adjustment sequence and mode usage
Usage
Used when you want to
match the position gain (PG1)
between 2 or more axes.
Normally not used for other
purposes.
Allows adjustment by merely
changing the response level
setting.
First use this mode to make
adjustment.
Used when the conditions of
auto tuning mode 1 are not
met and the load inertia
moment ratio could not be
estimated properly, for
example.
END
Interpolation
made for 2 or more
axes?
START
Operation
Auto tuning mode 2
OK?
OK?
Manual mode
OK?
No
No
Yes
No
Yes
No
Yes
Auto tuning mode 1
Operation
Interpolation mode
Operation
Yes
You can adjust all gains
manually when you want to
do fast settling or the like.
6.1.2 Adjustment using MR Configurator
This section gives the functions and adjustment that may be performed by using the servo amplifier with the
MR Configurator which operates on a personal computer.
Function Description Adjustment
Machine analyzer With the machine and servo motor coupled,
the characteristic of the mechanical system
can be measured by giving a random
vibration command from the personal
computer to the servo and measuring the
machine response.
You can grasp the machine resonance frequency and
determine the notch frequency of the machine resonance
suppression filter.
You can automatically set the optimum gains in response to
the machine characteristic. This simple adjustment is
suitable for a machine which has large machine resonance
and does not require much settling time.
Gain search Executing gain search under to-and-fro
positioning command measures settling
characteristic while simultaneously
changing gains, and automatically searches
for gains which make settling time shortest.
You can automatically set gains which make positioning
settling time shortest.
Machine simulation Response at positioning settling of a
machine can be simulated from machine
analyzer results on personal computer.
You can optimize gain adjustment and command pattern on
personal computer.