



















4 - 1
4. OPERATION
4. OPERATION
WARNING
Do not operate the switches with wet hands. You may get an electric shock.
CAUTION
Before starting operation, check the parameters. Some machines may perform
unexpected operation.
Take safety measures, e.g. provide covers, to prevent accidental contact of hands
and parts (cables, etc.) with the servo amplifier heat sink, regenerative resistor,
servo motor, etc. since they may be hot while power is on or for some time after
power-off. Their temperatures may be high and you may get burnt or a parts may
damaged.
During operation, never touch the rotating parts of the servo motor. Doing so can
cause injury.
4.1 Switching power on for the first time
When switching power on for the first time, follow this section to make a startup.
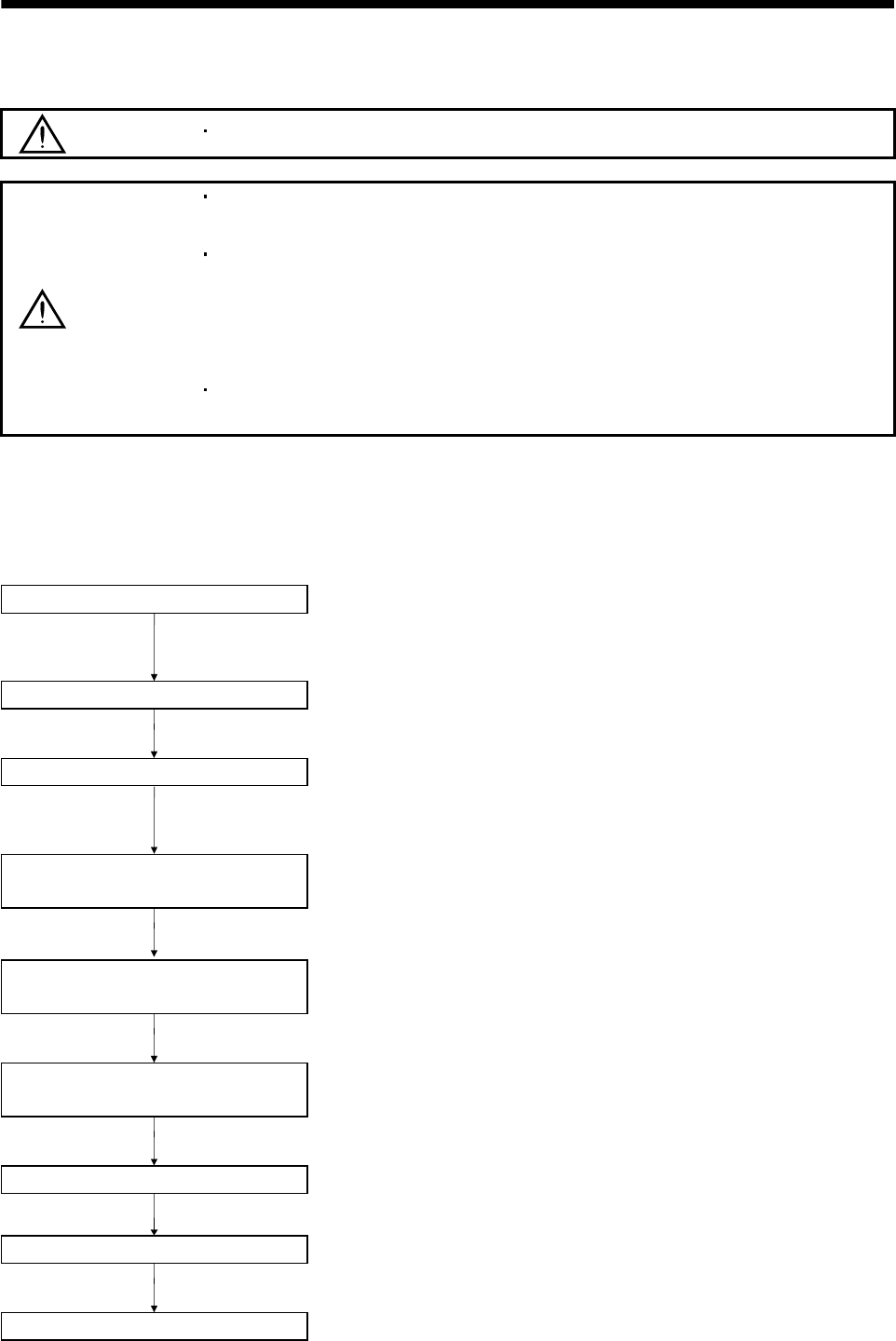
4.1.1 Startup procedure
Wiring check Check whether the servo amplifier and servo motor are wired
correctly using visual inspection, DO forced output function
(Section 6.7.4, 7.5.7 (4)), etc. (Refer to section 4.1.2.)
Surrounding environment check Check the surrounding environment of the servo amplifier and
servo motor. (Refer to section 4.1.3.)
Parameter setting Set the parameters as necessary, such as the used control
mode and regenerative option selection with the parameter unit
or MR Configurator. (Refer to chapter 5.)
Test operation of servo motor
alone in test operation mode
For the test operation, with the servo motor disconnected from
the machine and operated at the speed as low as possible, and
check whether the servo motor rotates correctly. (Refer to
sections 6.7 and 7.5.7.)
Test operation of servo motor
alone by commands
For the test operation with the servo motor disconnected from
the machine and operated at the speed as low as possible, and
check whether the servo motor rotates correctly.
Test operation with servo motor
and machine connected
Connect the servo motor with the machine, give operation
commands from the host command device, and check machine
motions.
Gain adjustment Make gain adjustment to optimize the machine motions. (Refer
to chapter 8.)
Actual operation
Stop Stop giving commands and stop operation.