



















1 - 10
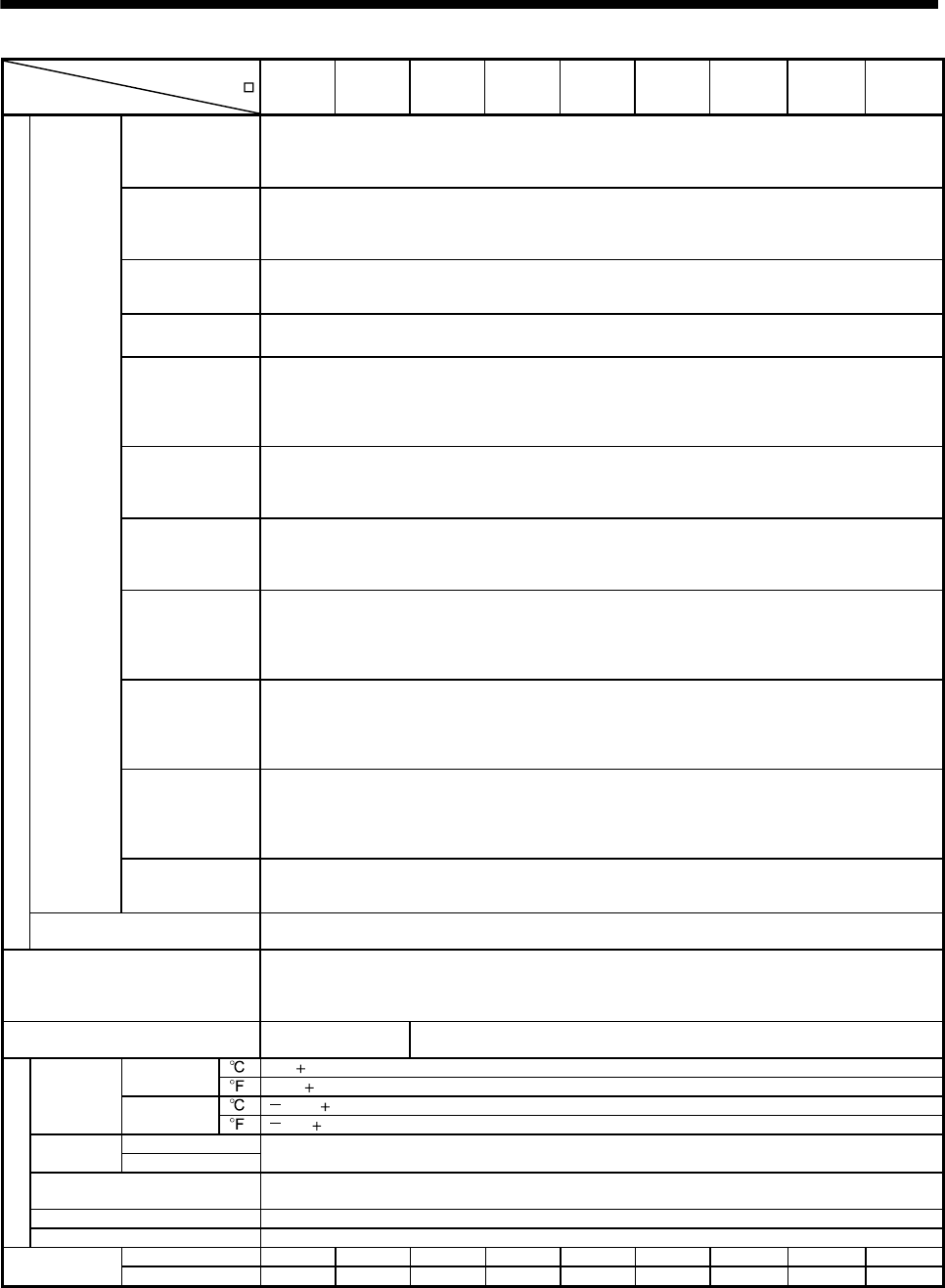
1. FUNCTIONS AND CONFIGURATION
Servo amplifier
MR-J3-
Item
60T4 100T4 200T4 350T4 500T4 700T4 11KT4 15KT4 22KT4
Operation mode
Home
position
return
mode
Dog type
Home position return is made starting with Z-phase pulse after passage of proximity dog.
Home position address may be set. Home position shift distance may be set. Home position
return direction may be selected.
Automatic at-dog home position return return/automatic stroke return function
Count type
Home position return is made by counting encoder pulses after contact with proximity dog.
Home position address may be set. Home position shift value may be set. Home position return
direction may be set.
Automatic at-dog home position return return/automatic stroke return function
Data setting type
Home position return is made without dog.
Home position may be set at any position by manual operation, etc. Home position address may
be set.
Stopper type
Home position return is made by pressing machine part against stroke end.
Home position address may be set. Home position return direction may be set.
Home position
ignorance
(Servo-on
position as home
position)
Position where servo-on (SON) is switched on is defined as home position.
Home position address may be set.
Dog type rear end
reference
Home position return is made with respect to the rear end of a proximity dog.
Home position address may be set. Home position shift value may be set. Home position return
direction may be set.
Automatic at-dog home position return return/automatic stroke return function
Count type front
end reference
Home position return is made with respect to the front end of a proximity dog.
Home position address may be set. Home position shift value may be set. Home position return
direction may be set.
Automatic at-dog home position return return/automatic stroke return function
Dog cradle type
Home position return is made with respect to the front end of a proximity dog by the first Z-phase
pulse.
Home position address may be set. Home position shift value may be set. Home position return
direction may be set.
Automatic at-dog home position return return/automatic stroke return function
Dog type last Z-
phase reference
Home position return is made with respect to the front end of a proximity dog by the last Z-phase
pulse.
Home position address may be set. Home position shift value may be set. Home position return
direction may be set.
Automatic at-dog home position return return/automatic stroke return function
Dog type front
end reference
Home position return is made to the dog front end with respect to the front end of a proximity
dog.
Home position address may be set. Home position shift value may be set. Home position return
direction may be set.
Automatic at-dog home position return return/automatic stroke return function
Dogless Z-phase
reference
Home position return is made with respect to the first Z-phase to the Z-phase.
Home position address may be set. Home position shift value may be set. Home position return
direction may be set.
Automatic positioning to home
position
High-speed automatic return to a defined home position.
Other functions
Absolute position detection, backlash function
Overtravel prevention using external limit switch
Software stroke limit
Override by analog input
Structure
Self-cooled, open
(IP00)
Force-cooling, open (IP00)
Environment
Ambient
temperature
In operation
[
] 0 to 55 (non-freezing)
[ ] 32 to 131 (non-freezing)
In storage
[
] 20 to 65 (non-freezing)
[ ] 4 to 149 (non-freezing)
Ambient
humidity
In operation
90%RH or less (non-condensing)
In storage
Ambient
Indoors (no direct sunlight)
Free from corrosive gas, flammable gas, oil mist, dust and dirt
Altitude Max. 1000m above sea level
Vibration 5.9 [m/s
2
] or less
Mass
[kg] 1.7 1.7 2.1 4.6 4.6 6.2 18 18 19
[lb] 3.75 3.75 4.63 10.1 10.1 13.7 39.7 39.7 42.9
Note 1. 150mA is the value applicable when all I/O signals of the servo amplifier are used. The current capacity can be decreased by
reducing the number of I/O points.
2. 800mA is the value applicable when all I/O signals of the MR-J3-D01 are used. The current capacity can be decreased by
reducing the number of I/O points.