



















3 - 15
3. SIGNALS AND WIRING
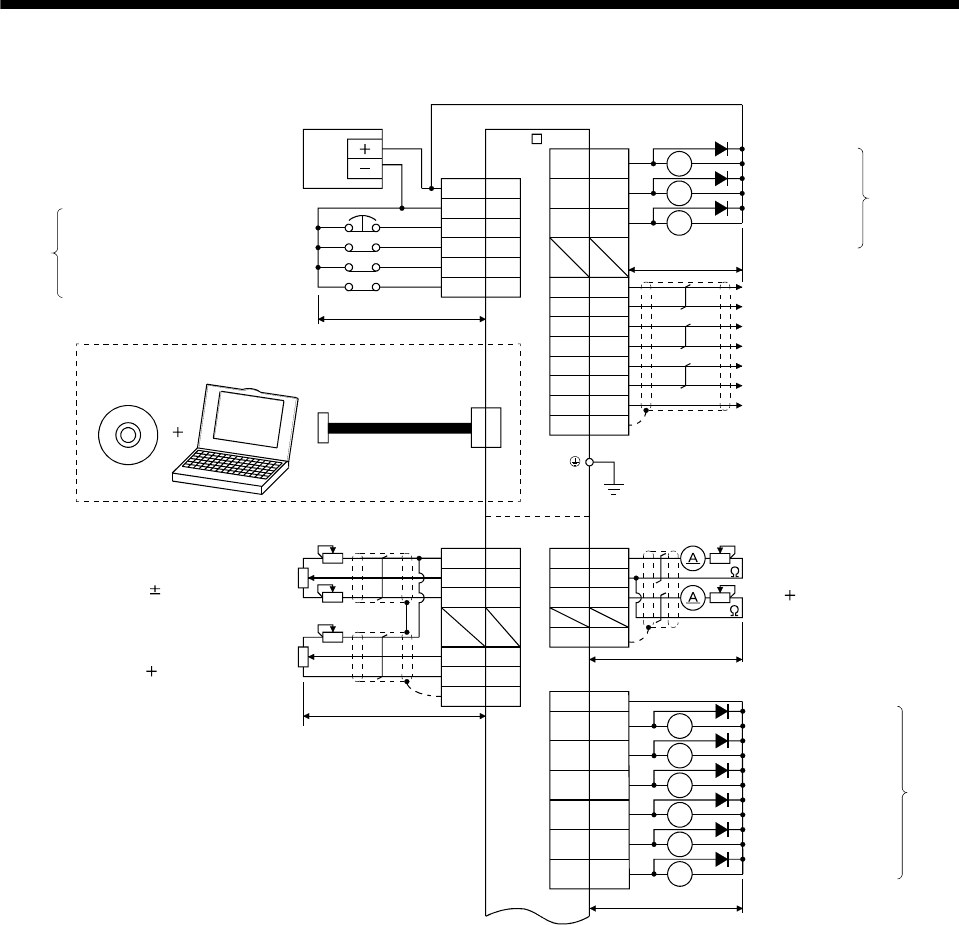
3.2.3 BCD input positioning operation with the programmable controller
Override
10V/0 to 200%
SD
LBR
LAR
LA
LB
LZ
LZR
LG
15
12
25
RA1
RA2
RA3
14 RD
ALM
16 ZP
CN6
11
24
13
26
1
2
3
CN6
4
5
17
EMG
DOG
LSP
LSN
DICOM
DOCOM
23
CN5
MR-J3-D01
CN20
10k
10k
4MO1
11 LG
14 MO2
CN20
SD
Plate
CN10
DICOM
14
44
RA6
RA7
PRQ1
45 PRQ2
RA8
46 PUS
48
RA9
RA10
RA11
47 MEN
CPO
49 INP
Position data request 1
12
SD
TLA
13
2
P15R
VC
Encoder A-phase pulse
(differential line driver)
Encoder B-phase pulse
(differential line driver)
Control common
Encoder Z-phase pulse
(differential line driver)
(Note 9)
Ready
Trouble (Note 6)
Home position
return completion
(Note 1)
Plate
Position data request 2
MR-J3- T
Plate
(Note 4, 11)
24VDC
power
supply
Forward rotation stroke end
Reverse rotation stroke end
(Note 5)
Proximity dog
(Note 3, 5)
Forced stop
(Note 9)
(Note 8)
(Note 7)
MR Configurator
Personal
computer
MR-J3USBCBL3M
(Option)
10m or less
Analog torque limit
10V/max. torque
Upper limit setting
Temporary stop
Rough match
In-position
Movement finish
(Note 9)
10m or less
Analog monitor
Max. 1mA ammeter
Upper limit setting
2m or less
2m or less
10m or less
(Note 2)
(Note 2)
N12R 15
Lower limit setting
LG
9