


















5 - 9
5. PARAMETERS
5.1.10 In-position range
Parameter
Initial
value
Unit Setting range
No. Symbol Name
PA10 INP In-position range 100 m 0 to 10000
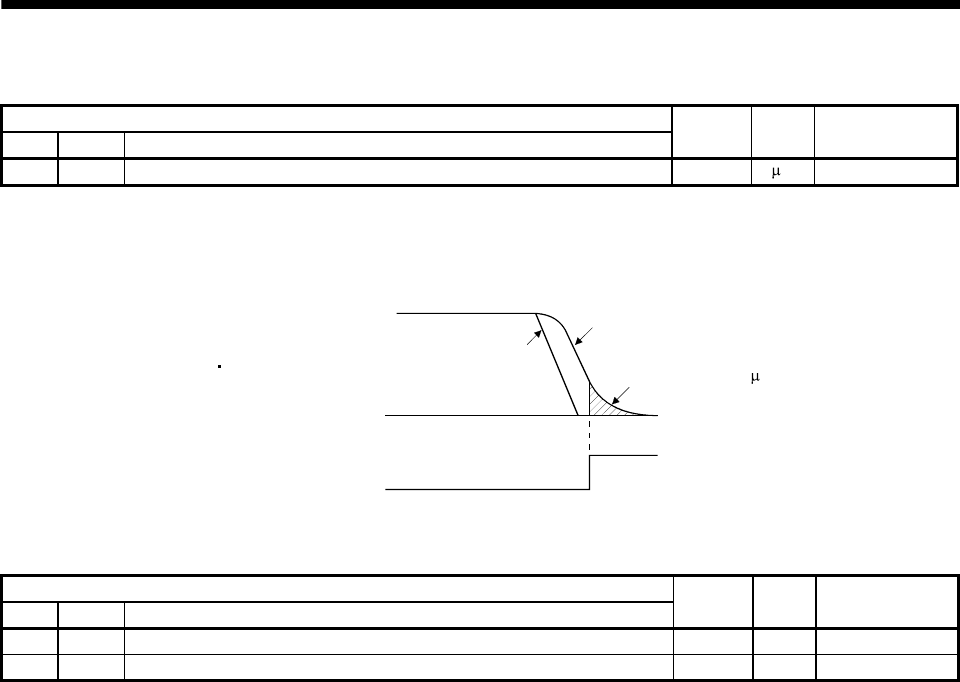
Set the range, where In position (INP) and Movement finish (MEND) are output, in the command pulse unit
before calculation of the electronic gear. With the setting of parameter No. PC24, the range can be changed to
the encoder output pulse unit.
Servo motor Droop pulse
In-position range [ m]
Command pulse
Command pulse
Droop pulse
In position (INP)
ON
OFF
5.1.11 Torque limit
Parameter
Initial
value
Unit Setting range
No. Symbol Name
PA11 TLP Forward rotation torque limit 100.0 % 0 to 100.0
PA12 TLN Reverse rotation torque limit 100.0 % 0 to 100.0
The torque generated by the servo motor can be limited.
When torque is output with the analog monitor output, the smaller torque of the values in the parameter
No.PA11 (forward rotation torque limit) and parameter No. PA12 (reverse rotation torque limit) is the maximum
output voltage (8V).
(1) Forward rotation torque limit (parameter No. PA11)
Set this parameter on the assumption that the maximum torque is 100[%]. Set this parameter when limiting
the torque of the servo motor in the CCW driving mode or CW regeneration mode. Set this parameter to
"0.0" to generate no torque.
(2) Reverse rotation torque limit (parameter No. PA12)
Set this parameter on the assumption that the maximum torque is 100[%]. Set this parameter when limiting
the torque of the servo motor in the CW driving mode or CCW regeneration mode. Set this parameter to
"0.0" to generate no torque.