



















5 - 31
5. PARAMETERS
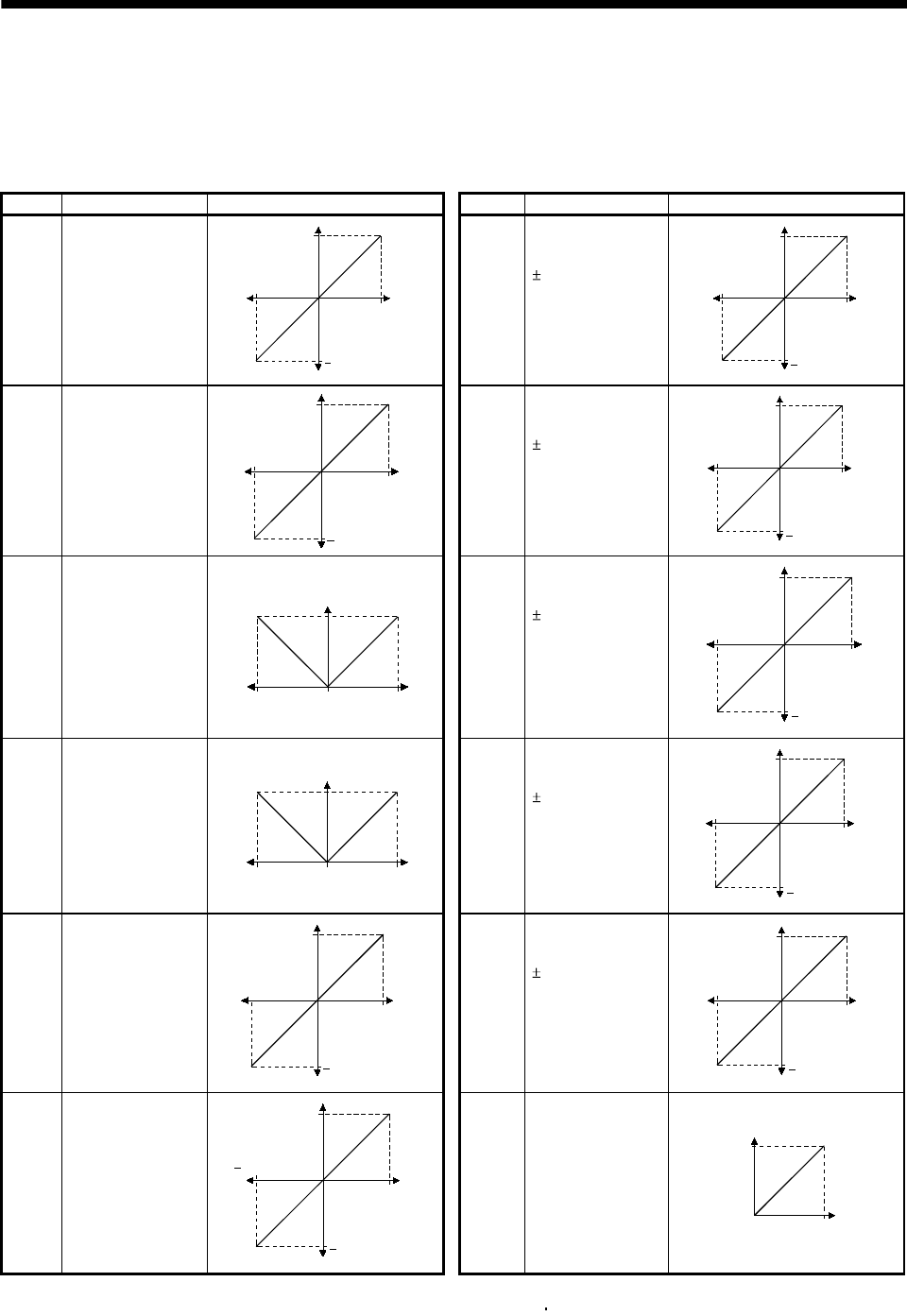
(2) Set content
The servo amplifier is factory-set to output the servo motor speed to analog monitor 1 (MO1) and the
torque to analog monitor (MO2). The setting can be changed as listed below by changing the
parameter No.17 value.
Refer to Appendix 2 for the measurement point.
Setting Output item Description Setting Output item Description
0Servo motor speed
8[V]
Max. speed
0
Max. speed
8[V]
CCW direction
CW direction
6 Droop pulses
(Note 1)
(
10V/128pulse)
10[V]
0
128[pulse]
10[V]
CCW direction
CW direction
128[pulse]
1 Torque (Note 2)
8[V]
Max. torque
0
Max. torque
8[V]
Drivin
g
in CW direction
Driving in CCW direction
7 Droop pulses
(Note 1)
(
10V/2048pulse)
10[V]
0
2048[pulse]
10[V]
CCW direction
CW direction
2048[pulse]
2Servo motor speed
8[V]
Max. speed
0
Max. speed
CCW
direction
CW
direction
8 Droop pulses
(Note 1)
(
10V/8192pulse)
10[V]
0
8192[pulse]
10[V]
CCW direction
CW direction
8192[pulse]
3 Torque(Note2)
8[V]
Max. torque
0
Max. torque
Driving in
CW direction
Driving in
CCW direction
9 Droop pulses
(Note 1)
(
10V/32768pulse)
10[V]
0
32768[pulse]
10[V]
CCW direction
CW direction
32768[pulse]
4 Current command
8[V]
Max. command
current
(Max. torque
command)
0
Max. command
current
(Max. torque
command)
8[V]
CCW direction
CW direction
A Droop pulses
(Note 1)
(
10V/131072pulse)
10[V]
0
131072[pulse]
10[V]
CCW direction
CW direction
131072[pulse]
5Command pulse
frequency
10[V]
500kpps
0
500kpps
10[V]
CCW direction
CW direction
BBus voltage
8[V]
0
400[V]
Note 1. Encoder pulse unit.
2. 8V is outputted at the maximum torque.However, when parameter No.28
76 are set to limit torgue, 8V is outputted at the
torque highly limited.