


















3 - 28
3. SIGNALS AND WIRING
(5) Torque limit
CAUTION
If the torque limit is canceled during servo lock, the servo motor may suddenly
rotate according to position deviation in respect to the command position.
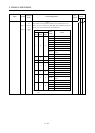
(a) Torque limit and torque
By setting parameter No. 28 (internal torque limit 1), torque is always limited to the maximum
value during operation. A relationship between the limit value and servo motor torque is shown
below.
0
0100
Max. torque
torque
Torque limit value [%]
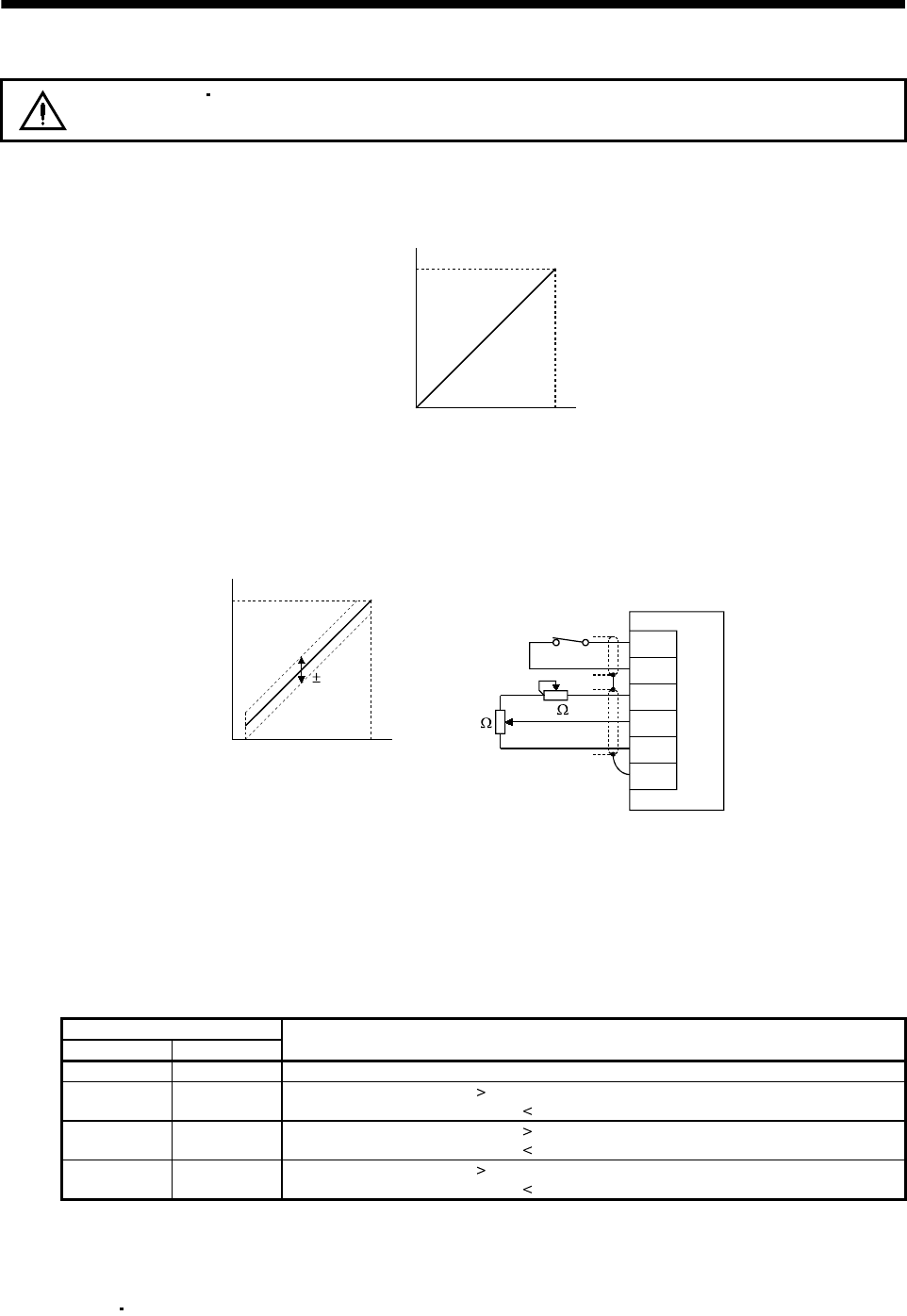
A relationship between the applied voltage of the analog torque limit (TLA) and the torque limit
value of the servo motor is shown below. Torque limit values will vary about 5% relative to the
voltage depending on products.
At the voltage of less than 0.05V, torque may vary as it may not be limited sufficiently. Therefore,
use this function at the voltage of 0.05V or more.
2k
2k
Servo amplifie
r
Japan resistor
RRS10 or equivalent
TL
SG
P15R
TLA
LG
SD
100
0
010
5%
0.05
Torque limit value [%]
TLA application voltage vs.
torque limit value
TLA application voltage [V]
(b) Torque limit value selection
Choose the torque limit made valid by the internal torque limit value 1 (parameter No. 28) using
the external torque limit selection (TL) or the torque limit made valid by the analog torque limit
(TLA) as indicated below.
When internal torque limit selection (TL1) is made usable by parameter No. 43 to 48, internal
torque limit 2 (parameter No. 76) can be selected. However, if the parameter No. 28 value is less
than the limit value selected by TL/TL1, the parameter No. 28 value is made valid.
(Note) External input signals
TL1 TL
Torque limit value made valid
0 0 Internal torque limit value 1 (parameter No. 28)
01
TLA
Parameter No. 28: Parameter No. 28
TLA
Parameter No. 28: TLA
10
Parameter No. 76
Parameter No. 28: Parameter No. 28
Parameter No. 76
Parameter No. 28: Parameter No. 76
11
TLA
Parameter No. 76: Parameter No. 76
TLA
Parameter No. 76: TLA
Note. 0: off
1: on
(c) Limiting torque (TLC)
TLC turns on when the servo motor torque reaches the torque limited using the internal torque
limit 1
2 or analog torque limit.