
















3 - 18
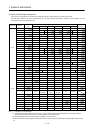
3. SIGNALS AND WIRING
Control
mode
Signal Symbol
Connector
pin No.
Functions/Applications
I/O
division
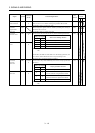
PST
Proportion
control
PC CN1B
8
Connect PC-SG to switch the speed amplifier from the
proportional integral type to the proportional type.
If the servo motor at a stop is rotated even one pulse due to any
external factor, it generates torque to compensate for a position
shift. When the servo motor shaft is to be locked mechanically
after positioning completion (stop), switching on the proportion
control (PC) upon positioning completion will suppress the
unnecessary torque generated to compensate for a position shift.
When the shaft is to be locked for a long time, switch on the
proportion control (PC) and torque control (TL) at the same time
to make the torque less than the rated by the analog torque limit.
DI-1
Emergency stop EMG CN1B
15
Turn EMG off (open EMG-common) to bring the motor to an
emergency stop state, in which the base circuit is shut off and the
dynamic brake is operated.
Turn EMG on (short EMG-common) in the emergency stop state
to reset that state.
DI-1
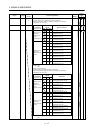
Clear CR CN1A
8
Turn CR on to clear the position control counter droop pulses on
its leading edge. The pulse width should be 10ms or more.
When the parameter No. 42 setting is "
1 ", the pulses are
always cleared while CR is on.
DI-1
Electronic gear
selection 1
CM1 When using CM1 and CM2, make them usable by the setting of
parameters No. 43 to 48.
The combination of CM1 and CM2 gives you a choice of four
different electronic gear numerators set in the parameters.
CM1 and CM2 cannot be used in the absolute position detection
system.
DI-1
(Note) Input signals
CM2 CM1
Electronic gear molecule
00 Parameter No. 3
01 Parameter No. 69
10 Parameter No. 70
11 Parameter No. 71
Electronic gear
selection 2
CM2
Note. 0: off
1: on
DI-1
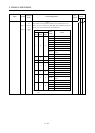
Gain changing CDP When using this signal, make it usable by the setting of
parameter No. 43 to 48.
Turn CDP on to change the load inertia moment ratio into the
parameter No. 61 setting and the gain values into the values
multiplied by the parameter No. 62 to 64 settings.
DI-1