



















15 - 26
15. ABSOLUTE POSITION DETECTION SYSTEM
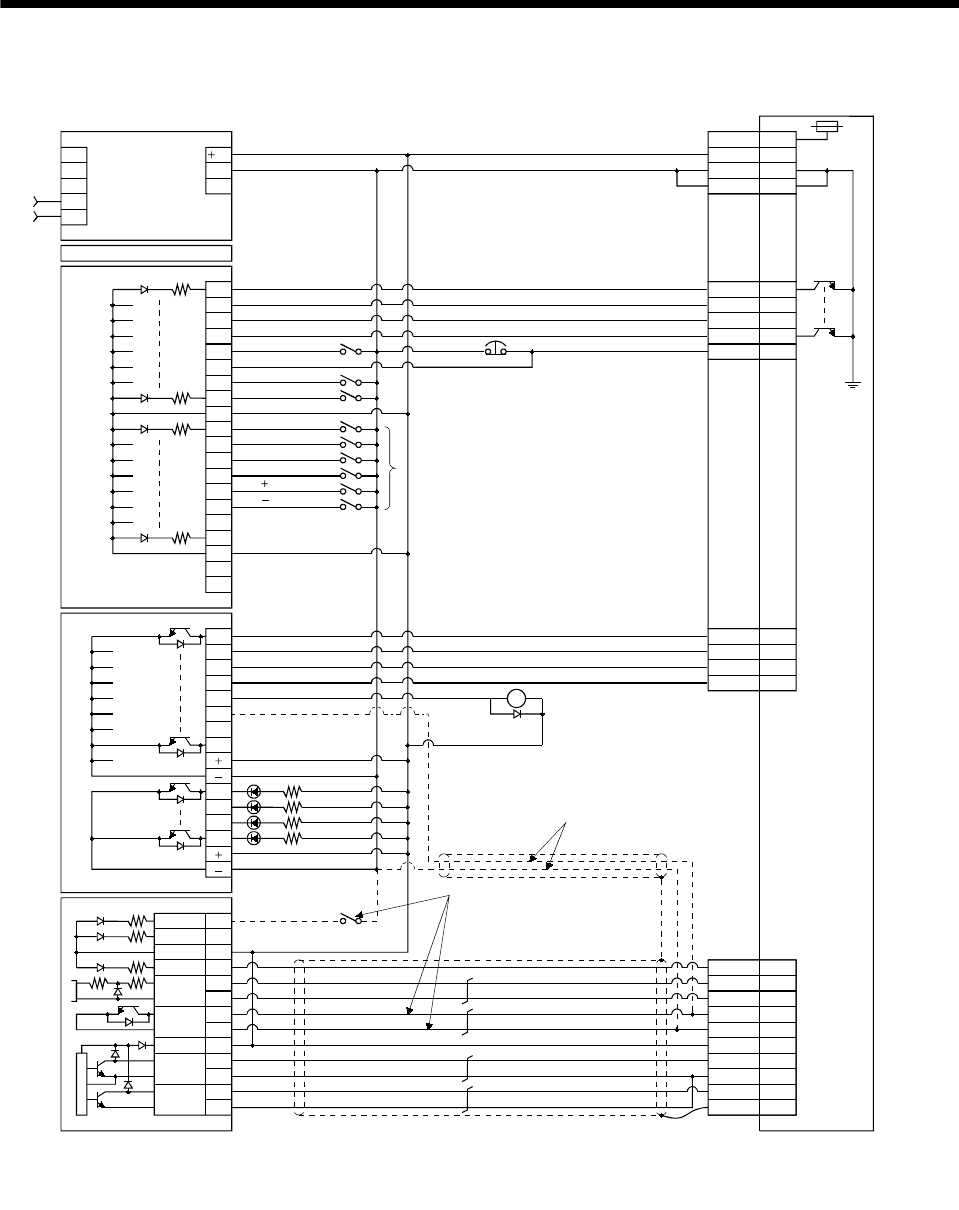
(2) Connection diagram
PULSE-
R
PULSE-
F
PGO
DOG
RDY
16B
16A
15B
15A
9B
9A
5B
6B
0
1
2
3
4
5
7
COM
8
9
A
B
C
D
E
F
COM
NC
NC
6
0
1
2
3
4
5
7
6
8
9
A
B
A1SD71-S2
A1SY40
A1SX40
A1SCPU
A1S62P
INPUT
AC100/200
COM1
COM2
(Note 3)
(Note 2)
12A
CLEAR
SD
NP
PP
SG
RD
P15R
CR
SG
19
4
8
10
20
3
2
Plate
5
8
9
14RES
ABSR
SON
ABSM
4
19
6
18
ZSP
15EMG
3
13
10
20SG
SG
VDD
COM
CN1B
24
24G
FGLG
Servo amplifier
CN1A
STOP 6A
5A
12B
17A
TLC
ALM
DO1
OP 14
OPC 11
General purpose
programmable controller
Power
supply
ABS bit 0/Completion of positioning
ABS bit 1/Zero speed
Send data ready/Torque limit control
Trouble
Servo-on
ABS transfer mode
ABS request
Alarm reset
Power supply
Power supply
Electromagnetic
brake output
(Note 4)
(Note 1)
JOG
JOG
Alarm reset
Emergency stop
Servo-on
Home position return
Operation mode I
Operation mode II
Position start
Position stop
Note 1. To be connected for dog type home position setting. The connection in Note 2 is not required.
2. To be connected for data set type home position setting. The connection in Note 1 is not required.
3. This circuit is for reference only.
4. The electromagnetic brake interlock (MBR) output should be controlled by connecting the programmable controller output to a relay.
RA2