



















4 - 4
4. OPERATION
4.2.3 Speed control mode
(1) Power on
1) Switch off the servo-on (SON) signal.
2) When main circuit power/control circuit power is switched on, the display shows "r (servo motor
speed)", and in two second later, shows data.
(2) Test operation
Using jog operation in the test operation mode, make sure that the servo motor operates. (Refer to
Section 6.8.2.)
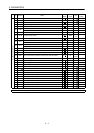
(3) Parameter setting
Set the parameters according to the structure and specifications of the machine. Refer to Chapter 5 for
the parameter definitions and to Sections 6.5 for the setting method.
Parameter No. Name Setting Description
0
Control mode, regenerative brake
option selection
0 2
Speed control mode
Regenerative brake option is not used.
1 Function selection 1
1 2
Input filter 3.555ms (initial value)
Electromagnetic brake interlock signal is used.
2 Auto tuning
1 5
Middle response (initial value) is selected.
Auto tuning mode 1 is selected.
8 Internal speed command 1 1000 Set 1000r/min.
9 Internal speed command 2 1500 Set 1500r/min.
10 Internal speed command 3 2000 Set 2000r/min.
11 Acceleration time constant 1000 Set 1000ms.
12 Deceleration time constant 500 Set 500ms.
13
S-pattern acceleration/deceleration
time constant
0 Not used
After setting the above parameters, switch power off once. Then switch power on again to make
the set parameter values valid.
(4) Servo-on
Switch the servo-on in the following procedure:
1) Switch on main circuit/control power supply.
2) Switch on the servo-on signal (SON) (short SON-SG).
When placed in the servo-on status, the servo amplifier is ready to operate and the servo motor is
locked.
(5) Start
Using speed selection 1 (SP1) and speed selection 2 (SP2), choose the servo motor speed. Turn on
forward rotation start (ST1) to run the motor in the forward rotation (CCW) direction or reverse
rotation start (ST2) to run it in the reverse rotation (CW) direction. At first, set a low speed and check
the rotation direction, etc. If it does not run in the intended direction, check the input signal.
On the status display, check the speed, load factor, etc. of the servo motor.
When machine operation check is over, check automatic operation with the host controller or the like.
This servo amplifier has a real-time auto tuning function under model adaptive control. Performing
operation automatically adjusts gains. The optimum tuning results are provided by setting the
response level appropriate for the machine in parameter No. 2. (Refer to chapter 7)