


















14 - 23
14. COMMUNICATION FUNCTIONS
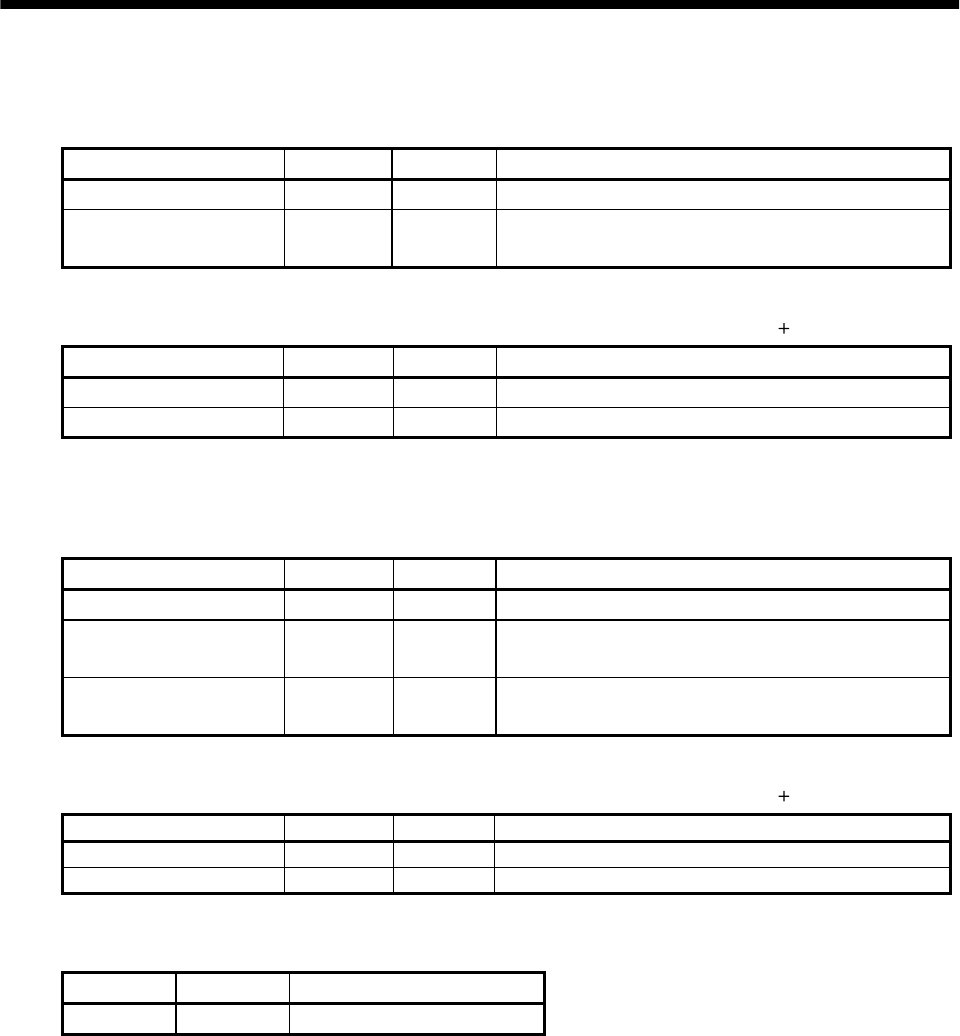
(2) Jog operation
Transmit the following communication commands:
(a) Setting of jog operation data
Item Command Data No. Data
Speed [A][0] [1][0] Write the speed [r/min] in hexadecimal.
Acceleration/decelerati
on time constant
[A][0] [1][1] Write the acceleration/deceleration time constant
[ms] in hexadecimal.
(b) Start
Turn on the external input signals SON and ST1/ST2 by using command [9][2]
data No. [0][0].
Item Command Data No. Data
Forward rotation start [9][2] [0][0] 00000801: Turns on SON and ST1.
Reverse rotation start [9][2] [0][0] 00001001: Turns on SON and ST2.
(3) Positioning operation
Transmit the following communication commands:
(a) Setting of positioning operation data
Item Command Data No. Data
Speed [A][0] [1][0] Write the speed [r/min] in hexadecimal.
Acceleration/decelerat
ion time constant
[A][0] [1][1] Write the acceleration/deceleration time constant
[ms] in hexadecimal.
Moving distance [A][0] [1][3] Write the moving distance [pulse] in
hexadecimal.
(b) Start
Turn on the external input signals SON and ST1/ST2 by using command [9][2]
data No. [0][0].
Item Command Data No. Data
Forward rotation start [9][2] [0][0] 00000801: Turns on SON and ST1.
Reverse rotation start [9][2] [0][0] 00001001: Turns on SON and ST2.
(c) Temporary stop
A temporary stop can be made during positioning operation.
Command Data No. Data
[A][0] [1][5] 1EA5
Retransmit the same communication commands as at the start time to resume operation.
To stop positioning operation after a temporary stop, retransmit the temporary stop communication
command. The remaining moving distance is then cleared.