5. PARAMETERS
5 - 32
No. Symbol Name and function
Initial
value
[unit]
Setting
range
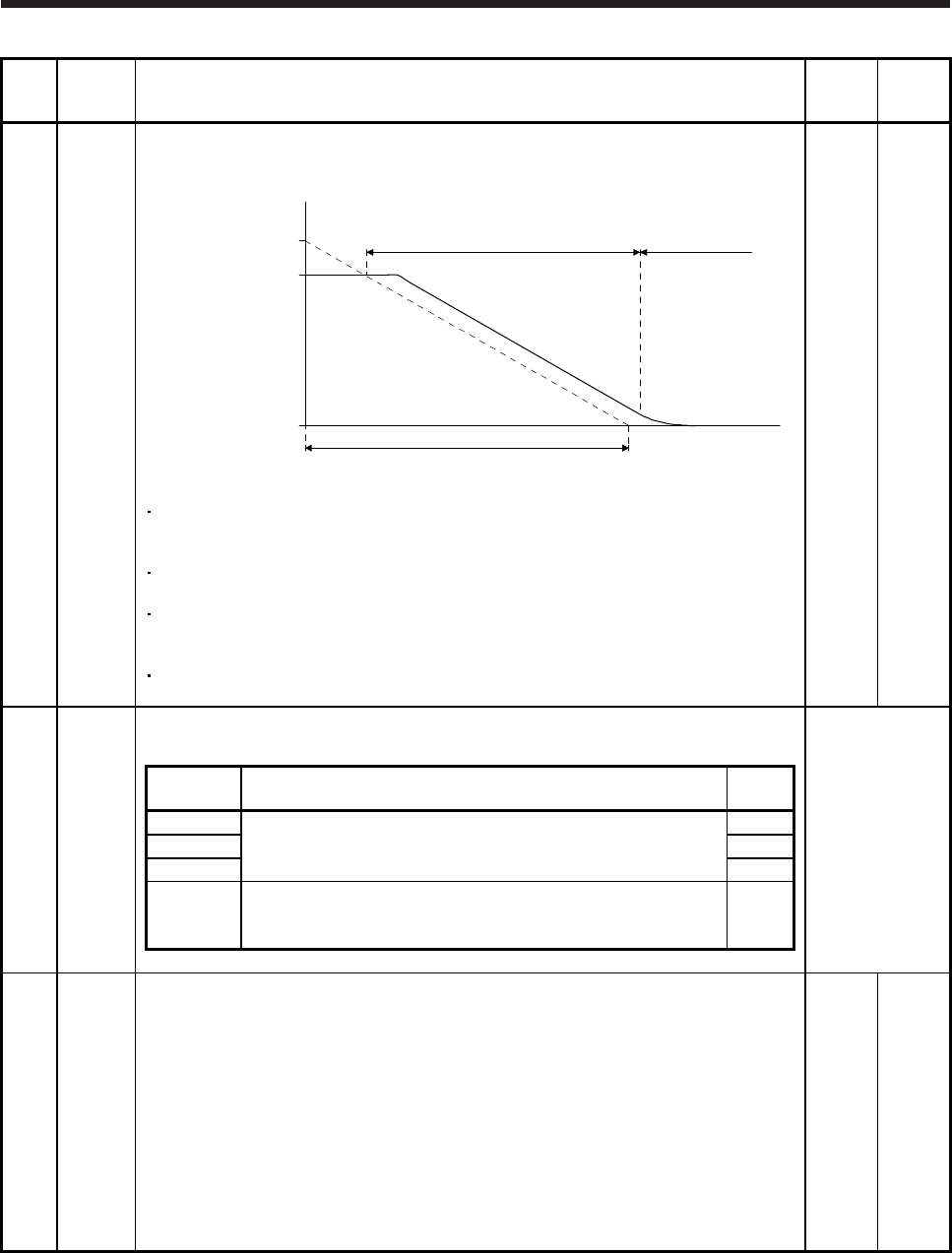
PC24 RSBR Forced stop deceleration time constant
Set a deceleration time constant for the forced stop deceleration function.
Set the time taken from the rated speed to 0 r/min in ms unit.
Forced stop deceleration
[Pr. PC24]
0 r/min
Servo motor speed
Rated speed
Dynamic brake
deceleration
[Precautions]
If the servo motor torque is saturated at the maximum torque during forced stop
deceleration because the set time is too short, the time to stop will be longer than the set
time constant.
[AL. 50 Overload 1] or [AL. 51 Overload 2] may occur during forced stop deceleration,
depending on the set value.
After an alarm that leads to a forced stop deceleration has occurred, if an alarm that does
not lead to a forced stop deceleration occurs or the power supply is cut, dynamic braking
will start regardless of the deceleration time constant setting.
Set a longer time than deceleration time at quick stop of the controller. If a shorter time is
set, [AL. 52 Error excessive] may occur.
100
[ms]
0 to
20000
PC29 *COPB Function selection C-B
Select the POL reflection at torque control.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x For manufacturer setting 0h
_ _ x _ 0h
_ x _ _ 0h
x _ _ _ POL reflection selection at torque control
0: Enabled
1: Disabled
0h
PC31 RSUP1 Vertical axis freefall prevention compensation amount
Set the compensation amount of the vertical axis freefall prevention function.
Set the amount in units of the servo motor rotation amount.
When a positive value is set, compensation is performed to the address increasing direction.
When a negative value is set, compensation is performed to the address decreasing direction.
The vertical axis freefall prevention function is performed when all of the following conditions
are met.
1) Position control mode
2) The value of the parameter is other than "0".
3) The forced stop deceleration function is enabled.
4) An alarm occurs or EM2 turns off when the servo motor speed is zero speed or less.
5) MBR (Electromagnetic brake interlock) was enabled in [Pr. PD07], and the base circuit
shut-off delay time was set in [Pr. PC02].
0
[0.0001
rev]
-25000
to
25000















































































































































































































































































