



















4 - 18
4. OPERATION
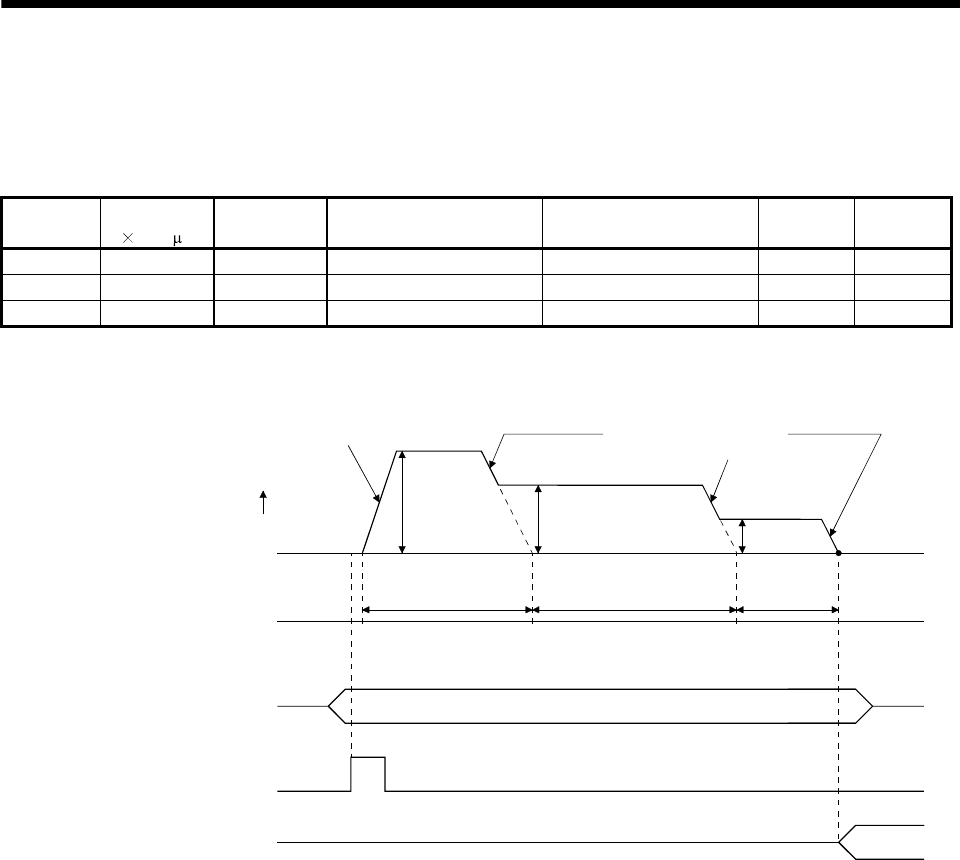
(b) Incremental value command system
The position data of the incremental value command system is the sum of the position data of the
consecutive point tables.
The operation example given below assumes that the set values are as indicated in the following
table.
Point table
No.
Position data
[
10
STM
m]
Servo motor
speed [r/min]
Acceleration time constant
[ms]
Deceleration time constant
[ms]
Dwell [ms]
(Note 1)
Auxiliary
function
1 5.00 3000 100 150 0 1
2 6.00 2000 Invalid Invalid 0 1
3 3.00 1000 Invalid Invalid 0 0 (Note 2)
Note 1. Always set "0".
2. Always set "0" to the auxiliary function of the last point table among the consecutive point tables.
ON
OFF
0
0 5.00 11.00 14.00
1
5.00 6.00 3.00
1
Servo motor speed
Position address
Selected point table No.
Forward rotation start (ST1)
Acceleration time constant
of point table No. 1 (100)
Deceleration time constant
of point table No. 1 (150)
Speed
(2000)
Speed
(3000)
Speed
(1000)
Forward
rotation
Point No. out put
(PT0 to PT4)
Note. Turning on Reverse rotation start (ST2) starts positioning in the reverse rotation direction.
(Note)