



















5 - 22
5. PARAMETERS
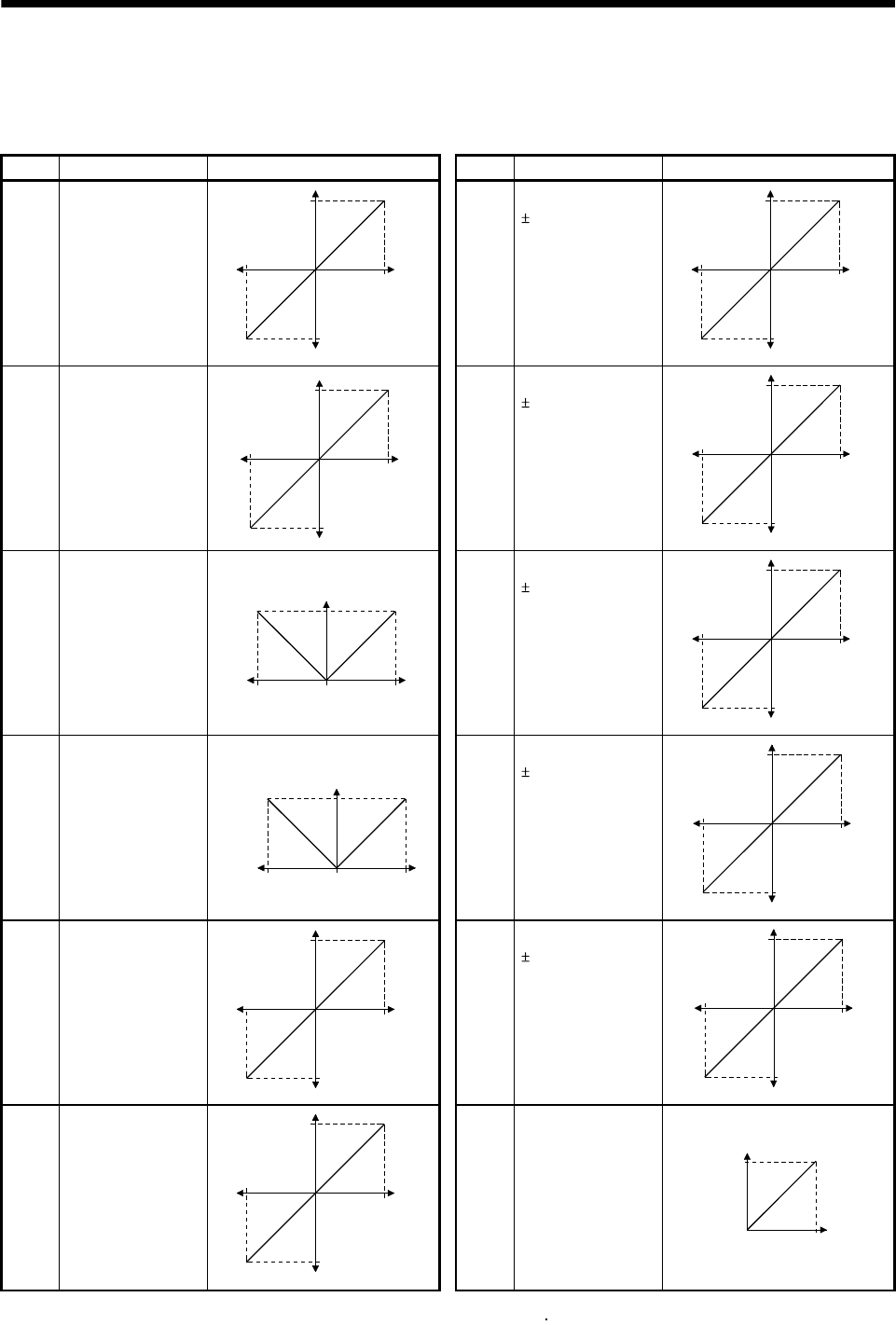
(2) Contents of a setting
The servo amplifier is factory-set to output the servo motor speed to analog monitor 1 and the torque
to analog monitor 2. The setting can be changed as listed below by changing the parameter No.17
(analog monitor output) value.
Refer to (3) for the measurement point.
Setting Output item Description Setting Output item Description
0 Servo motor speed
8[V]
Max. speed
0
Max. speed
-8[V]
CCW direction
CW direction
6 Droop pulses (Note 1)
( 10V/128pulse)
10[V]
0
128[pulse]
-10[V]
CCW direction
CW direction
128[pulse]
1 Torque (Note 2)
8[V]
Max. torque
0
Max. torque
-8[V]
Drivin
g
in CW direction
Driving in CCW direction
7 Droop pulses (Note 1)
( 10V/2048pulse)
10[V]
0
2048[pulse]
-10[V]
CCW direction
CW direction
2048[pulse]
2 Servo motor speed
8[V]
Max. speed
0
Max. speed
CCW
direction
CW
direction
8 Droop pulses (Note 1)
( 10V/8192pulse)
10[V]
0
8192[pulse]
-10[V]
CCW direction
CW direction
8192[pulse]
3 Torque (Note 2)
8[V]
Max. torque
0
Max. torque
Drivin
g
in
CCW direction
Driving in
CW direction
9 Droop pulses (Note 1)
( 10V/32768pulse)
10[V]
0
32768[pulse]
-10[V]
CCW direction
CW direction
32768[pulse]
4 Current command 8[V]
Max. command
current
0
Max. command
current
-8[V]
CCW direction
CW direction
A Droop pulses (Note 1)
( 10V/131072pulse)
10[V]
0
131072[pulse]
-10[V]
CCW direction
CW direction
131072[pulse]
5 Speed command
8[V]
Max. speed
0
Max. speed
-8[V]
CCW direction
CW direction
B Bus voltage
8[V]
0
400[V]
Note 1. Encoder pulse unit.
2. 8V is outputted at the maximum torque. However, when parameter No. 28
29 are set to limit torque, 8V is outputted at the
torque highly limited.