


















7 - 4
7. DISPLAY AND OPERATION
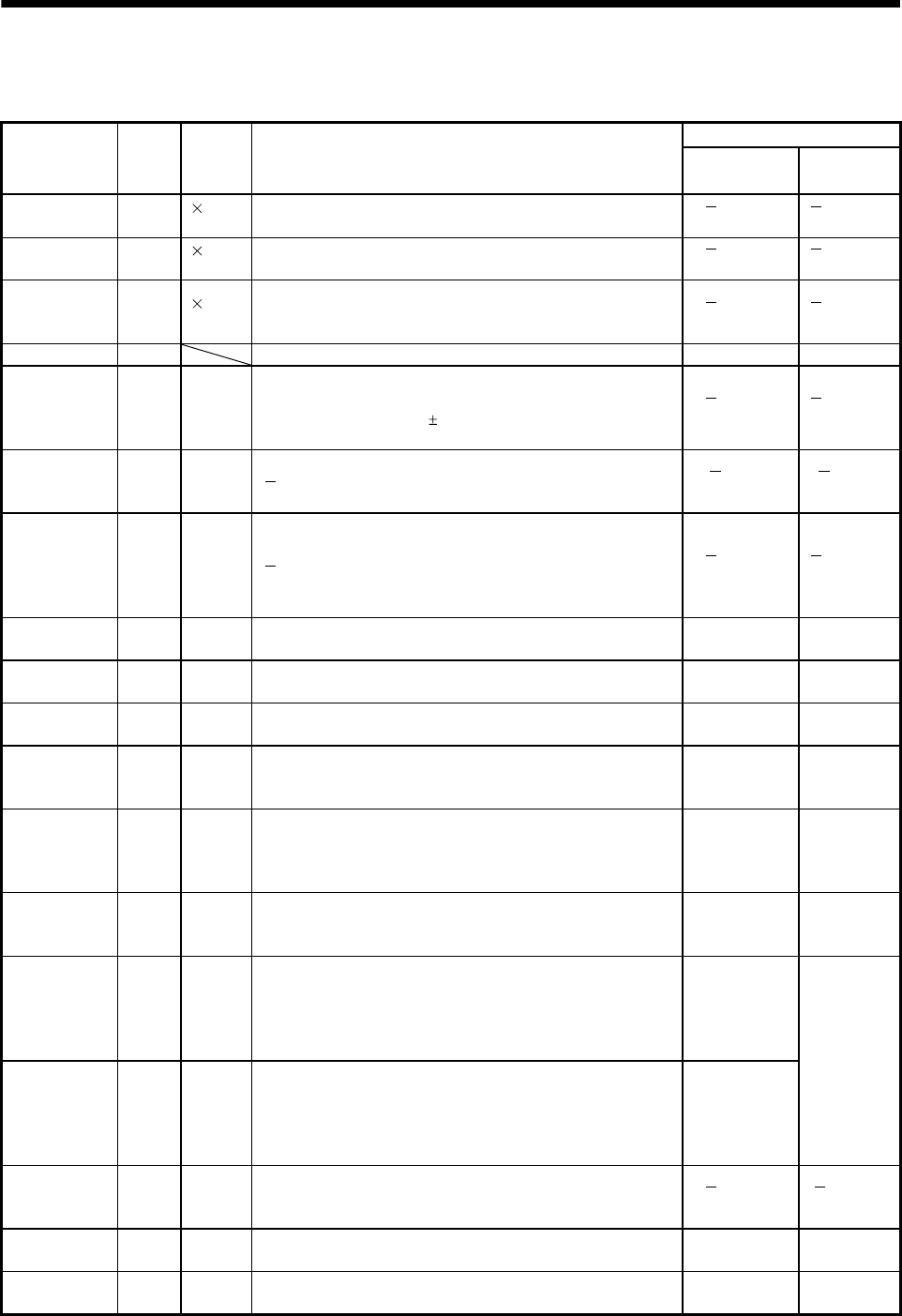
7.2.3 Status display list
The following table lists the servo statuses that may be shown.
Display range
Status display Symbol Unit Description
Servo amplifier
display
MR-DP60
Current
position
PoS
10
STM
mm
The current position from the machine home position of 0 is
displayed.
99999 to
99999
999999 to
999999
Command
position
CPoS
10
STM
mm
The command position is displayed. 99999 to
99999
999999 to
999999
Command
remaining
distance
rn
10
STM
mm
The command remaining distance of the currently selected
point table is displayed.
99999 to
99999
999999 to
999999
Point table No. PT The point table No. being executed is displayed. 0 to 31 0 to 31
Cumulative
feedback
pulses
C pulse
Feedback pulses from the servo motor encoder are counted
and displayed.
When the value exceeds
9999999, it returns to zero.
Press the "SET" button to reset the display value to zero.
99999 to
99999
999999 to
999999
Servo motor
speed
r r/min
The servo motor speed is displayed.
"
" is added to the speed of the servo motor rotating in the
CW rotation.
5400 to
5400
5400 to
5400
Droop pulses E pulse
The number of droop pulses in the deviation counter is
displayed.
" " is added to the droop pulses in the CW rotation.
The displayed number of pulses is not yet multiplied by the
electronic gear value.
99999 to
99999
999999 to
999999
Override F %
The override setting is displayed.
100% is displayed when override is invalid.
0 to 200 0 to 200
Analog torque
limit voltage
u V
The voltage of the Analog torque limit (TLA) is displayed.
0.00 to 10.00 0.00 to 10.00
Regenerative
load ratio
L %
The ratio of regenerative power to permissible regenerative
power is displayed in %.
0 to 100 0 to 100
Effective load
ratio
J %
The continuous effective load torque is displayed.
The effective value in the past 15 seconds is displayed
relative to the rated torque of 100%.
0 to 300 0 to 300
Peak load ratio b %
The maximum torque generated during
acceleration/deceleration, etc.
The highest value in the past 15 seconds is displayed
relative to the rated torque of 100%.
0 to 300 0 to 300
Instantaneous
torque
T %
Torque that occurred instantaneously is displayed.
The value of the torque that occurred is displayed in real
time relative to the rate torque of 100%.
0 to 400 0 to 400
Within one-
revolution
position low
Cy1 pulse
Position within one revolution is displayed in encoder
pulses.
The value returns to 0 when it exceeds the maximum
number of pulses.
The value is incremented in the CCW direction of rotation.
0 to 99999
Within one-
revolution
position high
Cy2
100
pulse
The within one-revolution position is displayed in 100 pulse
increments of the encoder.
The value returns to 0 when it exceeds the maximum
number of pulses.
The value is incremented in the CCW direction of rotation.
0 to 1310
(Note)
0 to 131071
ABS counter LS rev
Travel value from the home position in the absolute position
detection systems is displayed in terms of the absolute
position detectors counter value.
32768 to
32767
32768 to
32767
Load inertia
moment ratio
dC times
The estimated ratio of the load inertia moment to the servo
motor shaft inertia moment is displayed.
0.0 to 300.0 0.0 to 300.0
Bus voltage Pn V
The voltage (across P-N) of the main circuit converter is
displayed.
0 to 450 0 to 450
Note. The MR-DP60 can display the status without dividing it into the high and low orders. The unit is [pulse].