



















5 - 23
5. PARAMETERS
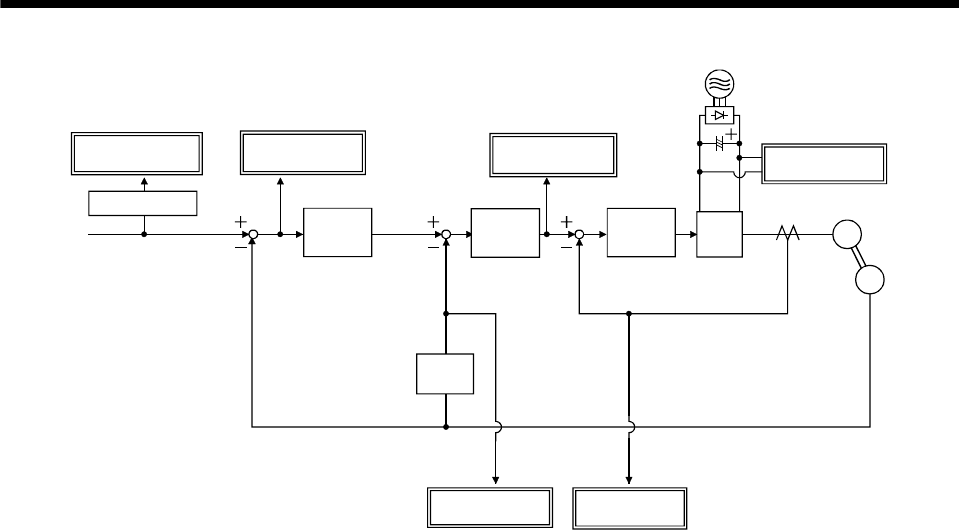
PWM M
Current
control
Speed
control
Current
command
Position
control
Droop pulse
Differ-
ential
Command
speed
Bus voltage
Speed
command
Command
position
Current feedback
Position feedback
Servo Motor
speed
Current encoder
Servo Moto
r
Encoder
Torque
differentiation