















9 - 6
9. SPECIAL ADJUSTMENT FUNCTIONS
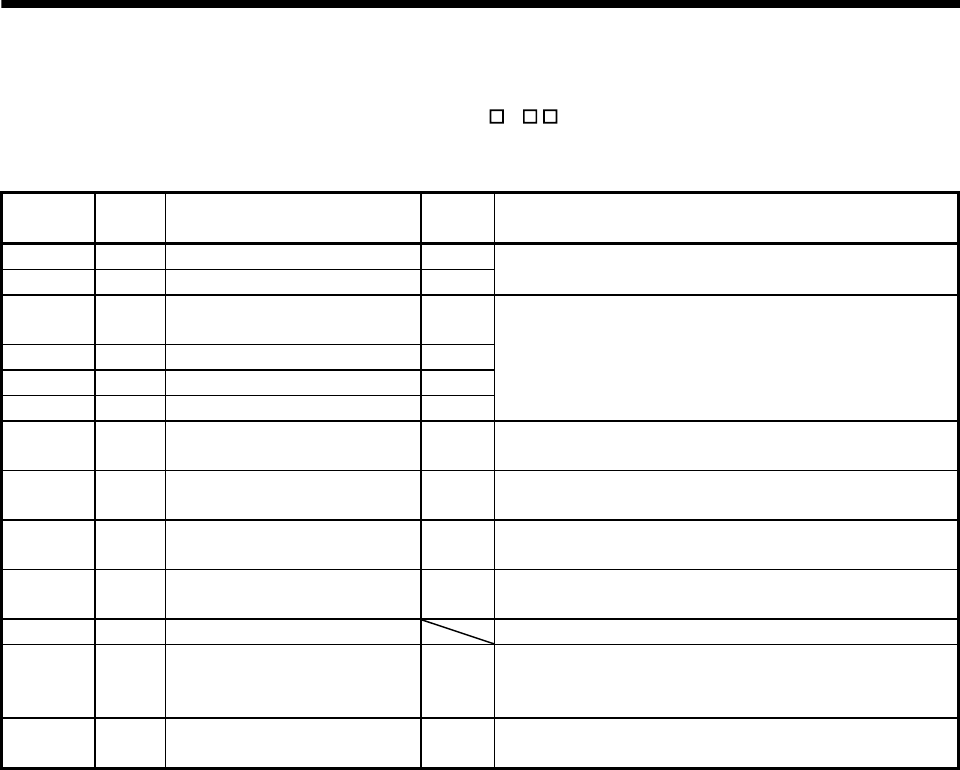
9.5.3 Parameters
When using the gain changing function, always set "
4 " in parameter No.3 (auto tuning) to choose
the manual mode of the gain adjustment modes. The gain changing function cannot be used in the auto
tuning mode.
Parameter
No.
Abbrev-
iation
Name Unit Description
7 PG1 Position control gain 1 rad/s
36 VG1 Speed control gain 1 rad/s
Position and speed gains of a model used to set the response
level to a command. Always valid.
34 GD2
Ratio of load inertia moment to
servo motor inertia moment
0.1
times
35 PG2 Position control gain 2 rad/s
37 VG2 Speed control gain 2 rad/s
38 VIC Speed integral compensation ms
Control parameters before changing
64 GD2B
Ratio of load inertia moment to
servo motor inertia moment 2
0.1
times
Used to set the ratio of load inertia moment to servo motor
inertia moment after changing.
65 PG2B
Position control gain 2 changing
ratio
%
Used to set the ratio (%) of the after-changing position
control gain 2 to position control gain 2.
66 VG2B
Speed control gain 2 changing
ratio
%
Used to set the ratio (%) of the after-changing speed control
gain 2 to speed control gain 2.
67 VICB
Speed integral compensation
changing ratio
%
Used to set the ratio (%) of the after-changing speed integral
compensation to speed integral compensation.
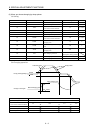
68 CDP Gain changing selection Used to select the changing condition.
69 CDS Gain changing condition
kpps
pulse
r/min
Used to set the changing condition values.
70 CDT Gain changing time constant ms
You can set the filter time constant for a gain change at
changing.