


















3 - 7
3. SIGNALS AND WIRING
Device name
Devices
symbol
Connector
pin No.
Functions/Applications
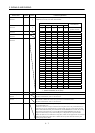
The following table lists the point table numbers that may be chosen by the
combinations of DI0, DI1, DI2, DI3 and DI4.
Point table No.
selection 1
DI0 CN1B
5
(Note)Input signal
DI4 DI3 DI2 DI1 DI0
Point table No.
Point table No.
selection 2
DI1 CN1B
14
0 0 0 0 0
0 (Manual home
position return)
0 0 0 0 1 1 Point table No.
selection 3
DI2
0 0 0 1 0 2
0 0 0 1 1 3 Point table No.
selection 4
DI3
0 0 1 0 0 4
0 0 1 0 1 5
0 0 1 1 0 6
0 0 1 1 1 7
0 1 0 0 0 8
0 1 0 0 1 9
0 1 0 1 0 10
0 1 0 1 1 11
0 1 1 0 0 12
0 1 1 0 1 13
0 1 1 1 0 14
0 1 1 1 1 15
1 0 0 0 0 16
1 0 0 0 1 17
1 0 0 1 0 18
1 0 0 1 1 19
1 0 1 0 0 20
1 0 1 0 1 21
1 0 1 1 0 22
1 0 1 1 1 23
1 1 0 0 0 24
1 1 0 0 1 25
1 1 0 1 0 26
1 1 0 1 1 27
1 1 1 0 0 28
1 1 1 0 1 29
1 1 1 1 0 30
1 1 1 1 1 31
Point table No.
selection 5
DI4
Note. 0: DI0/DI1/DI2/DI3/DI4-SG off (open)
1: DI0/DI1/DI2/DI3/DI4-SG on (short)
Override selection OVR Short OVR-SG to make override (VC) valid.
External torque limit
selection
TL Short TL-SG to make external analog torque limit valid.
For more information, refer to section 3.4.4.
Internal torque limit
selection
TL2 Open TL2-SG to make the torque limit value set in parameter No.28 (TL1) valid, or
short them to make the value set in parameter No.29 (TL2) valid.
For more information, refer to section 3.4.4.
Proportion control PC Connect PC-SG to switch the speed amplifier from the proportional integral type to
the proportional type.
If the servo motor at a stop is rotated even one pulse due to any external factor, it
generates torque to compensate for a position shift. In such a case where the axis
will be locked mechanically after Movement finish (MEND) has turned off, turning
Proportion control (PC) on as soon as Movement finish (MEND) turns off can
suppress unnecessary torque that attempts to compensate for a position shift.
When the shaft is to be locked for a long time, switch on the proportion control (PC)
and torque (TL) at the same time to make the torque less than the rated by the
analog torque limit (TLA).