



















5 - 24
5. PARAMETERS
5.2.5 Changing the stop pattern using a limit switch
The servo amplifier is factory-set to make a sudden stop when the limit switch or software limit is made
valid. When a sudden stop is not required, e.g. when there is an allowance from the limit switch
installation position to the permissible moving range of the machine, a slow stop may be selected by
changing the parameter No.22 setting.
Parameter No. 22 setting Description
0 (initial value) Droop pulses are reset to make a stop. (Sudden stop)
1 Droop pulses are drawn out to make a slow stop. (Slow stop)
5.2.6 Alarm history clear
The alarm history can be confirmed by using the MR Configurator (Set-up Software) or communication
function. The servo amplifier stores one current alarm and five past alarms from when its power is
switched on first. To control alarms which will occur during operation, clear the alarm history using
parameter No.16 (alarm history clear) before starting operation. Clearing the alarm history automatically
returns to “
0 ”.
This parameter is made valid by switching power off, then on after setting.
Alarm history clear
0: Invalid (not cleared)
1: Valid (cleared)
Parameter No. 16
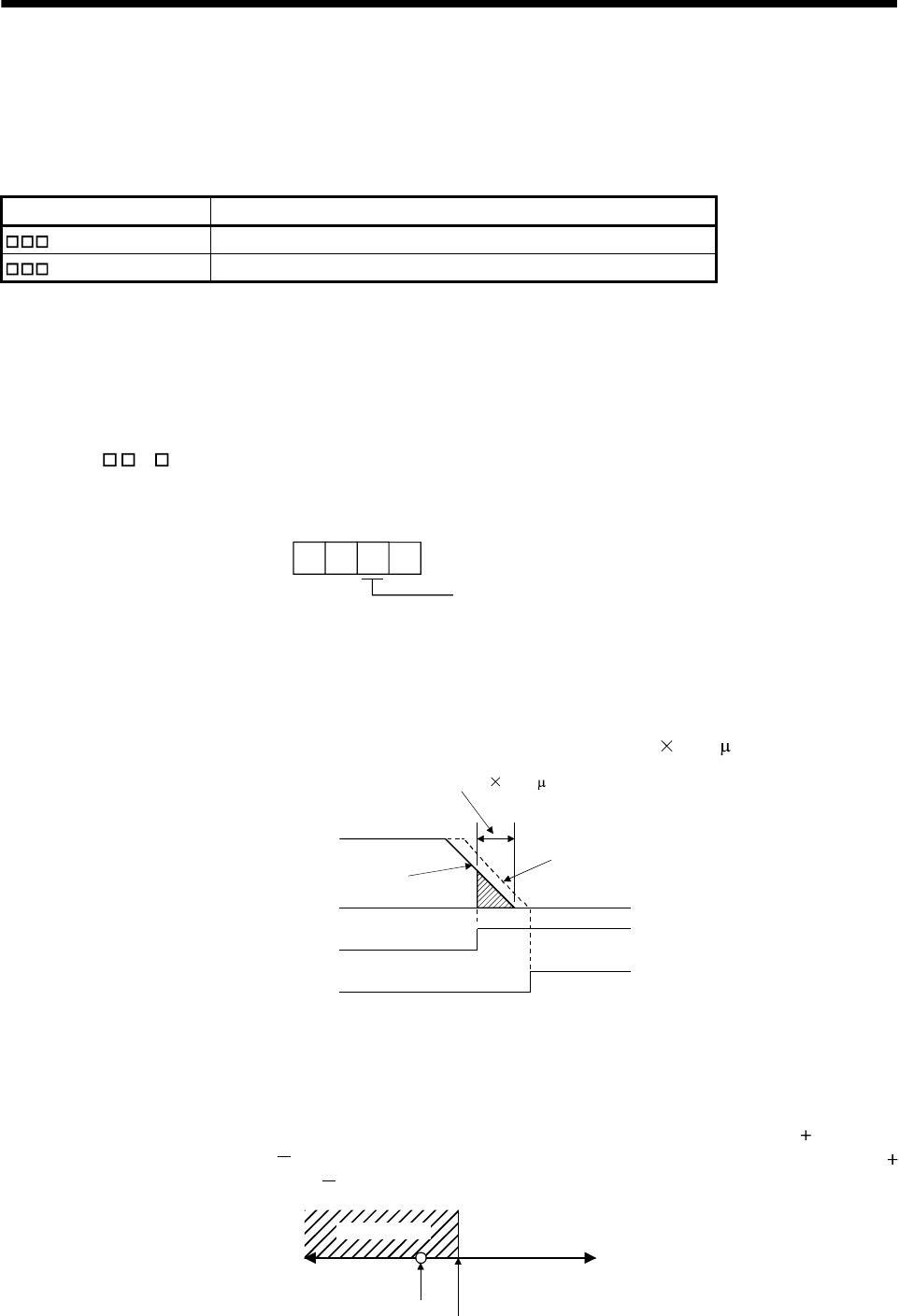
5.2.7 Rough match output
Rough match (CPO) is output when the command remaining distance reaches the value set in parameter
No. 12 (rough match output range). The set remaining distance is 0 to 65535 [
10
STM
m].
Servo motor
speed
ON
OFF
ON
OFF
Command remaining distance ( 10
STM
m)
set in parameter No. 12
Rough match
(CPO)
In position (INP)
Command pulse
Actual servo motor speed
5.2.8 Software limit
A limit stop using a software limit is made as in stroke end operation. When a motion goes beyond the
setting range, the motor is stopped and servo-locked. This function is made valid at power-on but made
invalid during home position return. This function is made invalid when the software limit
setting is
the same as the software limit
setting. A parameter error (AL. 37) will occur if the software limit
setting is less than the software limit
setting.
Current position
Unmovable
Movable
Movable area
Software limit
Inhibited area