



















1 - 10
1. FUNCTIONS AND CONFIGURATION
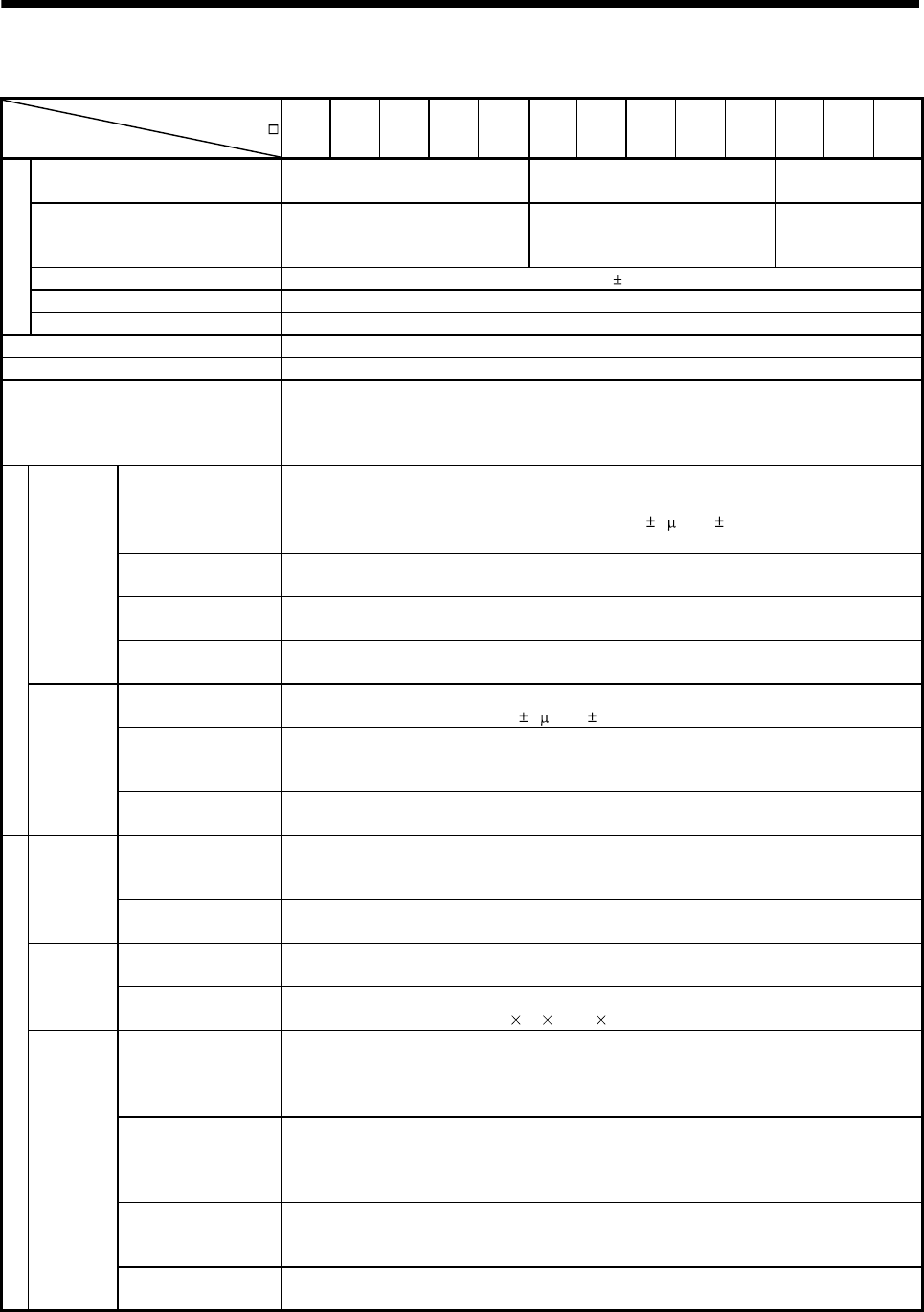
1.2 Servo amplifier standard specifications
Servo amplifier
MR-J2S-
Item
10CP 20CP 40CP 60CP 70CP 100CP 200CP 350CP 500CP 700CP 10CP1 20CP1 40CP1
Voltage/frequency
3-phase 200 to 230VAC, 50/60Hz
or 1-phase 230VAC, 50/60Hz
3-phase 200 to 230VAC, 50/60Hz
1-phase 100 to
120VAC 50/60Hz
Permissible voltage fluctuation
3-phase 200 to 230VAC:
170 to 253VAC
1-phase 230VAC: 207 to 253VAC
3-phase 170 to 253VAC
1-phase
85 to 127VAC
Permissible frequency fluctuation Within 5%
Power supply capacity Refer to section13.2
Power supply
Inrush current Refer to section13.5
Control system Sine-wave PWM control, current control system
Dynamic brake Built-in
Protective functions
Overcurrent shut-off, regenerative overvoltage shut-off, overload shut-off (electronic
thermal relay), servo motor overheat protection, encoder error protection, regenerative
brake error protection, undervoltage, instantaneous power failure protection, overspeed
protection, excessive error protection
Operational
specifications
Positioning by specifying the point table No. (31 points)
Position command
input
Set in point table. 1-point feed length setting range: 1[ m] to 999.999[mm]
Speed command
input
Set in point table. Acceleration/deceleration time is set in point table.
S-pattern acceleration/deceleration time constant is set in parameter No.14.
System
Signed absolute value command system, incremental value command system, signed
absolute value command/incremental value command specifying system
Point table
number
input
Operational
specifications
Positioning using RS-422 (232C) communication data
Position command
input
Setting through RS-422 (232C) communication
1-point feed length setting range:
1[ m] to 999.999[mm]
Speed command
input
Setting through RS-422 (232C) communication
Acceleration/deceleration time is also set through RS-422 (232C) communication.
S-pattern acceleration/deceleration time constant is set in parameter No.14.
Command system
Position
data input
System
Signed absolute value command system, incremental value command system, signed
absolute value command/incremental value command specifying system
Point table
Point table number input, position data input system
Positioning operation is performed once in accordance with the position and speed
commands.
Automatic
operation
mode
Automatic continuous
operation
Varied speed operation (2 to 31 speeds), automatic continuous positioning operation (2 to
31 points)
Jog
Jog operation is performed in accordance with the parameter-set speed command by
contact input or through RS-422 (232C) communication.
Manual
operation
mode
Manual pulse
generator
Manual feed is made by manual pulse generator.
Command pulse multiplication:
1, 10 or 100 is selected using parameter.
Dog type
Home position return is made starting with Z-phase pulse after passage of proximity dog.
Home position address may be set. Home position shift distance may be set. Home position
return direction may be selected.
Automatic at-dog home position return return/automatic stroke return function
Count type
Home position return is made by counting encoder pulses after contact with proximity dog.
Home position address may be set. Home position shift value may be set. Home position
return direction may be set.
Automatic at-dog home position return return/automatic stroke return function
Data setting type
Home position return is made without dog.
Home position may be set at any position by manual operation, etc. Home position address
may be set.
Operation mode
Manual
home
position
return
mode
Stopper type
Home position return is made by pressing machine part against stroke end.
Home position address may be set. Home position return direction may be set.