



















4 - 40
4. OPERATION
4.5 Absolute position detection system
CAUTION
If an absolute position erase alarm (AL.25) or an absolute position counter warning
(AL.E3) has occurred, always perform home position setting again. Not doing so
can cause runaway.
POINT
When the following parameters are changed, the home position is lost
when turning on the power after the change. Execute the home position
return again when turning on the power.
First digit of parameter No.1 (ST1 coordinate system selection)
Parameter No. 4 (Electronic gear numerator)
Parameter No. 5 (Electronic gear denominator)
Parameter No. 42 (Home position return position data)
This servo amplifier contains a single-axis controller. Also, all servo motor encoders are compatible with
an absolute position system. Hence, an absolute position detection system can be configured up by merely
loading an absolute position data back-up battery and setting parameter values.
(1) Restrictions
An absolute position detection system cannot be built under the following conditions.
1) Stroke-less coordinate system, e.g. rotary shaft, infinite positioning.
2) Operation performed in incremental value command type positioning system.
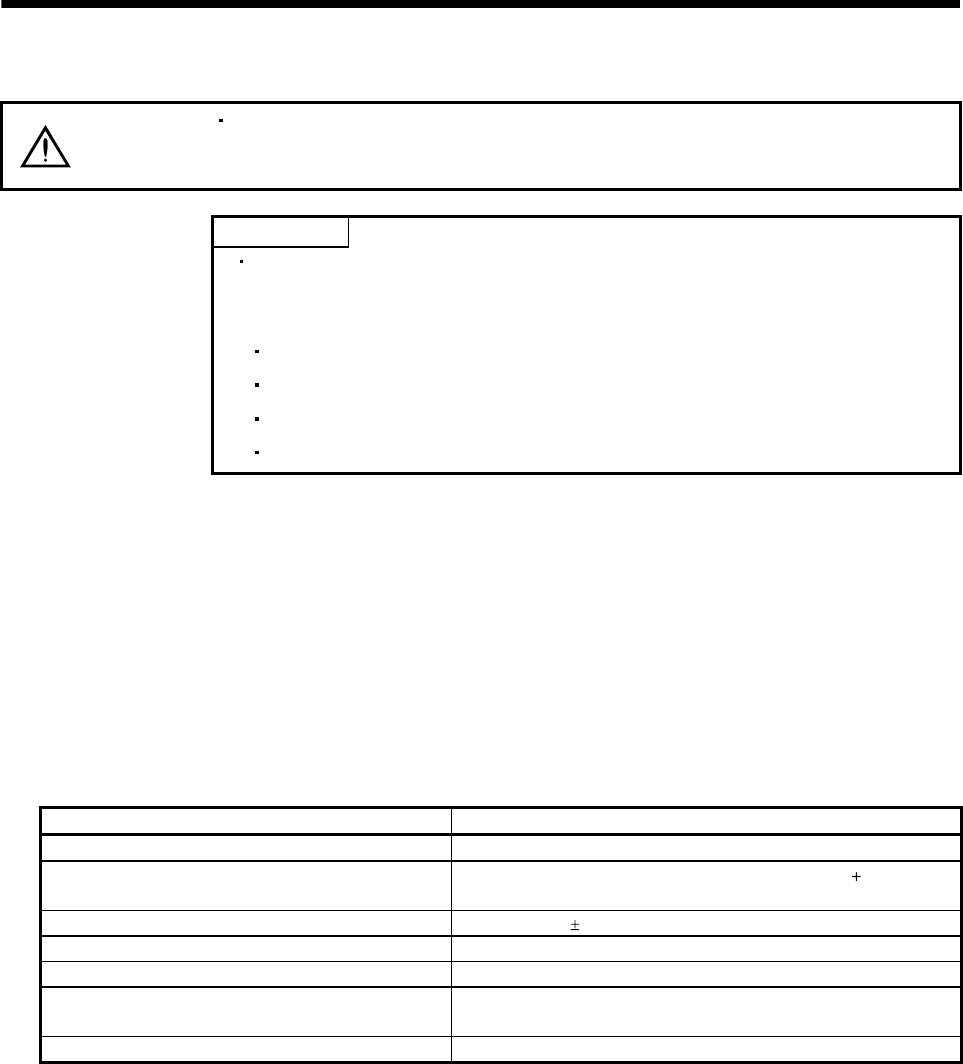
(2) Specifications
Item Description
System Electronic battery backup system
Battery
1 piece of lithium battery ( primary battery, nominal
3.6V)
Type: MR-BAT or A6BAT
Maximum revolution range Home position 32767 rev.
(Note 1) Maximum speed at power failure 500r/min
(Note 2) Battery backup time Approx. 10,000 hours (battery life with power off)
(Note 3) Data holding time during battery
replacement
2 hours at delivery, 1 hour in 5 years after delivery
Battery storage period 5 years from date of manufacture
Note 1. Maximum speed available when the shaft is rotated by external force at the time of power failure or the like.
2. Time to hold data by a battery with power off. It is recommended to replace the battery in three years independently of
whether power is kept on or off.
3. Period during which data can be held by the super capacitor in the encoder after power-off, with the battery voltage low or
the battery removed, or during which data can be held with the encoder cable disconnected.
Battery replacement should be finished within this period.