
















9 - 9
9. SPECIAL ADJUSTMENT FUNCTIONS
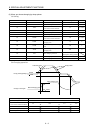
(2) When you choose changing by droop pulses
(a) Setting
Parameter No. Abbreviation Name Setting Unit
7 PG1 Position control gain 1 100 rad/s
36 VG1 Speed control gain 1 1000 rad/s
34 GD2
Ratio of load inertia moment to
servo motor inertia moment
40 0.1 times
35 PG2 Position control gain 2 120 rad/s
37 VG2 Speed control gain 2 3000 rad/s
38 VIC Speed integral compensation 20 ms
64 GD2B
Ratio of load inertia moment to
servo motor inertia moment 2
100 0.1 times
65 PG2B
Position control gain 2
changing ratio
70 %
66 VG2B
Speed control gain 2 changing
ratio
133 %
67 VICB
Speed integral compensation
changing ratio
250 %
68 CDP Gain changing selection
0003
(Changed by droop pulses)
69 CDS Gain changing condition 50 pulse
70 CDT Gain changing time constant 100 ms
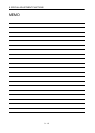
(b) Changing operation
CDT 100ms
0
Droop pulses [pulses]
Change of each gain
CDS
CDS
Before-changing gain
After-changing gain
Command pulse
Droop pulses
Position control gain 1 100
Speed control gain 1 1000
Ratio of load inertia moment
to servo motor inertia moment
4.0
10.0 4.0 10.0
Position control gain 2 120 84 120 84
Speed control gain 2 3000 4000 3000 4000
Speed integral compensation 20 50 20 50