



















15 - 11
15. COMMUNICATION FUNCTIONS
15.11 Command and data No. list
POINT
If the command/data No. is the same, its data may be different from the
interface and drive units and other servo amplifiers.
15.11.1 Read commands
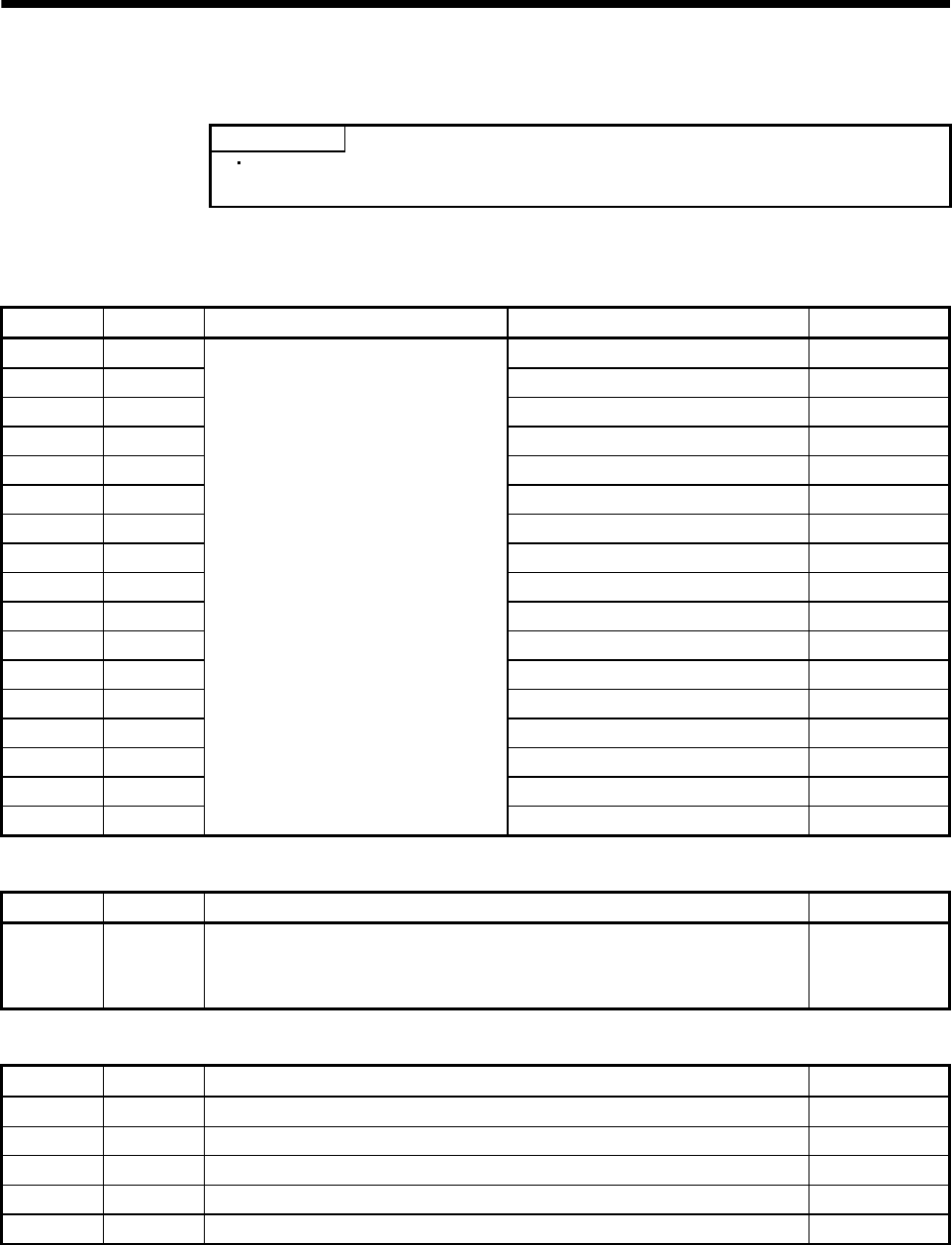
(1) Status display (Command [0][1])
Command Data No. Description Display item Frame length
[0][1] [8][0] Current position 12
[0][1] [8][1] Command position 12
[0][1] [8][2] Command remaining distance 12
[0][1] [8][3] Point table No. 12
[0][1] [8][4] Cumulative feedback pulses 12
[0][1] [8][5] Servo motor speed 12
[0][1] [8][6] Droop pulses 12
[0][1] [8][7] Override 12
[0][1] [8][8] Torque limit voltage 12
[0][1] [8][9] Regenerative load ratio 12
[0][1] [8][A] Effective load ratio 12
[0][1] [8][B] Peak load ratio 12
[0][1] [8][C] Instantaneous torque 12
[0][1] [8][D] Within one-revolution position 12
[0][1] [8][E] ABS counter 12
[0][1] [8][F] Load inertia moment ratio 12
[0][1] [9][0]
Status display data value and
processing information
Bus voltage 12
(2) Parameter (Command [0][5])
Command Data No. Description Frame length
[0][5]
[0][0] to
[5][A]
Current value of each parameter
The decimal equivalent of the data No. value (hexadecimal) corresponds
to the parameter number.
8
(3) External I/O signals (Command [1][2])
Command Data No. Description Frame length
[1][2] [0][0] Input device statuses 8
[1][2] [4][0] External input pin statuses 8
[1][2] [6][0] Statuses of input devices switched on through communication 8
[1][2] [8][0] Output device statuses 8
[1][2] [C][0] External output pin statuses 8