

















4 - 44
4. OPERATION
4.6.2 Positioning operation
Positioning operation can be performed by changing the point table settings and making a start. For
example, positioning operation can be performed by writing the data of point table No.1, then specifying
point table No.1, and making a start.
For transmission data details, refer to chapter 15.
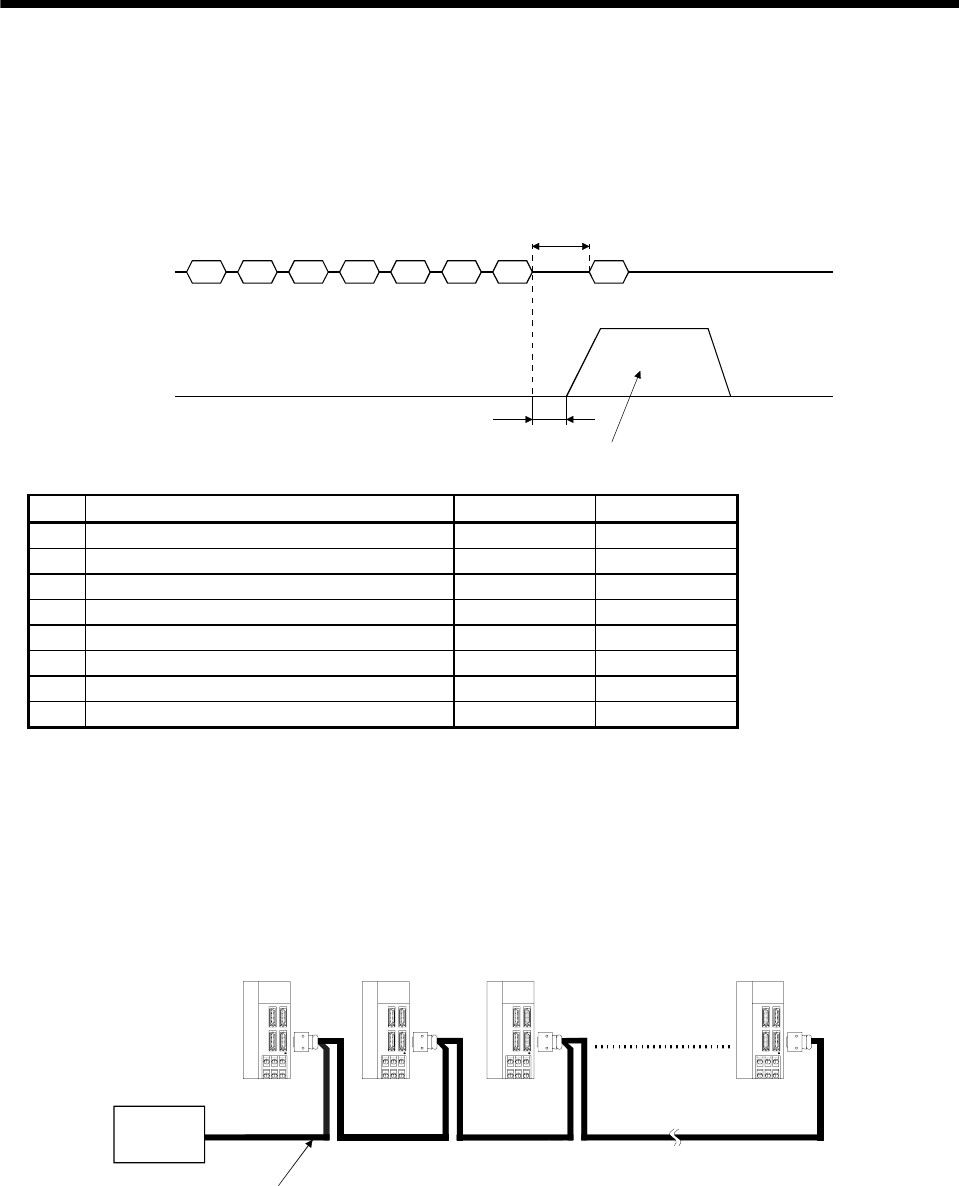
Transmission data
Servo motor speed
1) 2) 3) 4) 5) 6) 7)
Values set with transmission data 1) to 5) are used for operation.
5ms or more
8)
3ms
No. Transmission data Command Data No.
1) Point table No.1 position data write [C] [0] [0] [1]
2) Point table No.1 speed [C] [6] [0] [1]
3) Point table No.1 acceleration time constant [C] [7] [0] [1]
4) Point table No.1 deceleration time constant [C] [8] [0] [1]
5) Point table No.1 auxiliary function [C] [B] [0] [1]
6) Point table No.1 selection [9] [2] [6] [0]
7) Forward rotation start (ST1) ON [9] [2] [6] [0]
8) Forward rotation start (ST1) OFF [9] [2] [6] [0]
4.6.3 Multidrop system
The RS-422 communication function can be used to operate several servo amplifiers on the same bus. In
this case, set the station numbers to the servo amplifiers to determine the destination servo amplifier of
the currently transmitted data. Use parameter No.15 to set the station numbers.
Always set one station number to one servo amplifier. Normal communication cannot be made if one
station number is set to two or more servo amplifiers. When using one command to operate several servo
amplifiers, use the group designation function described in section 4.6.4.
CHARG E
MITSUBISHI
Controller
RS-422
For cable connection diagram,
refer to section 15.1.1.
CHARGE
MITSUBISHI
CHARG E
MITSUBISHI
CHARGE
MITSUBISHI
To CN3
Axis 1
(Station 0)
Axis 2
(Station 1)
Axis 3
(Station 2)
To CN3 To CN3 To CN3
Axis 32
(Station 31)