



















3 - 60
3. CC-LINK COMMUNICATION FUNCTIONS
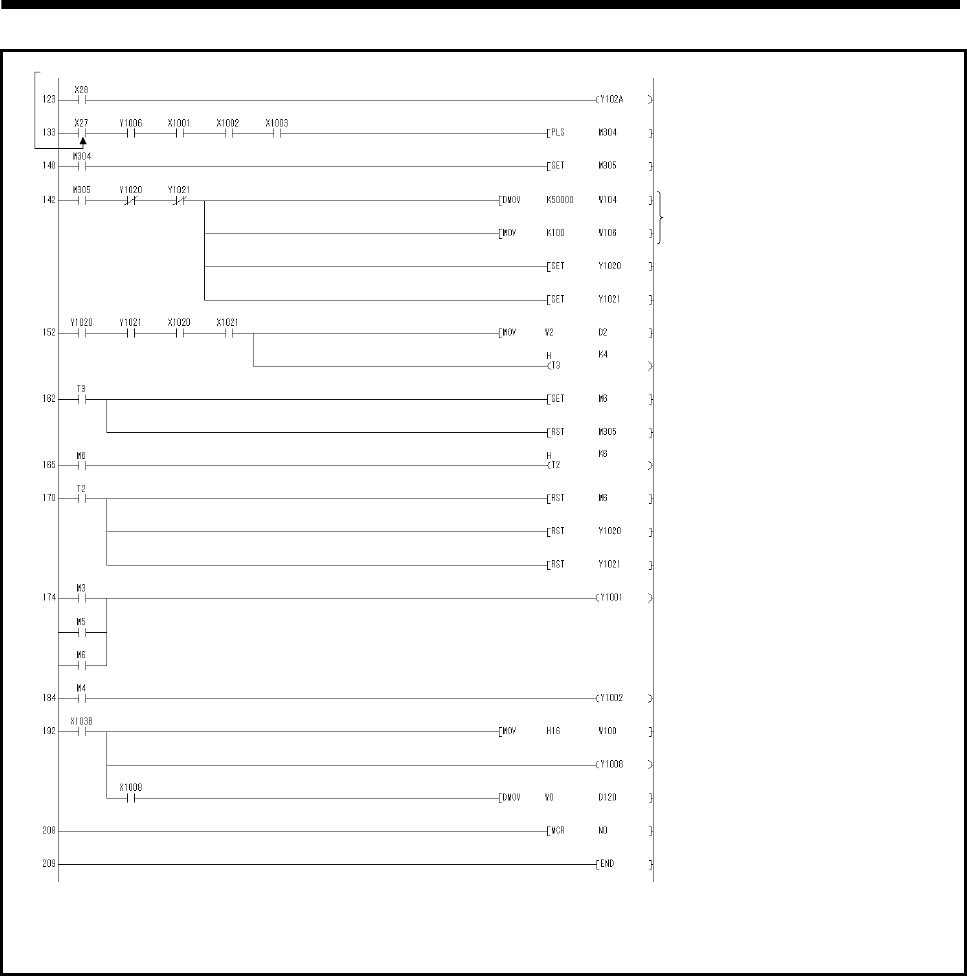
Position/speed setting system changing command
Position/speed specifying system selection
(RY2A)
Reads respond code (RWr2) to D2 when
position instruction execution completion (RX20)
and speed instruction execution completion
(RX21) turn on.
Position and speed data establishment time
4ms *1
Reads motor speed (RWr0, RWr1) to D120 and
D121 when monitoring (RX08) turns on.
Positioning start command
In
position
Rough
match
Home position
return completion
*1: This is when the high-speed timer limit is set to 1ms.
Setting time for the timer should be larger than the command processing
time or twice the link scan time whichever larger. When the setting time
is short, the command cannot be received properly.
Writes position command data (K50000) to
RWw4, RWw5, and speed data (K100) to
RWw6.
Turns on position instruction demand (RY20).
Turns on speed instruction demand (RY21).
Positioning start command
Command request time 6ms *1
Turns off position instruction demand (RY20).
Turns off speed instruction demand (RY21).
Forward rotation start (RY01)
Positioning start command reset
Sets monitor code (H0016) of motor speed to
RWw0.
Turns on monitor output execution demand
(RY08).
Reverse rotation start (RY02)