

















10 - 12
10. SPECIAL ADJUSTMENT FUNCTIONS
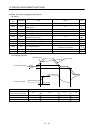
10.6.3 Parameters
When using the gain changing function, always set "
3" in parameter No.PA08 (auto tuning) to choose the
manual mode of the gain adjustment modes. The gain changing function cannot be used in the auto tuning
mode.
Parameter
No.
Abbreviation Name Unit Description
PB06 GD2
Ratio of load inertia moment to
servo motor inertia moment
Multi-
plier
(
1)
Control parameters before changing.
PB07 PG1
Model loop gain
rad/s
Position and speed gains of a model used to set the response
level to a command. Always valid.
PB08 PG2 Position loop gain rad/s
PB09 VG2 Speed loop gain rad/s
PB10 VIC Speed integral compensation ms
PB29 GD2B
Gain changing ratio of load inertia
moment to servo motor inertia
moment
Multi-
plier
(
1)
Used to set the ratio of load inertia moment to servo motor
inertia moment after changing.
PB30 PG2B Gain changing position loop gain rad/s Used to set the value of the after-changing position loop gain.
PB31 VG2B Gain changing speed loop gain rad/s Used to set the value of the after-changing speed loop gain.
PB32 VICB
Gain changing speed integral
compensation
ms
Used to set the value of the after-changing speed integral
compensation.
PB26 CDP Gain changing selection Used to select the changing condition.
PB27 CDS
Gain changing condition kpps
pulse
r/min
Used to set the changing condition values.
PB28 CDT
Gain changing time constant
ms
You can set the filter time constant for a gain change at
changing.
PB33 VRF1B
Gain changing vibration
suppression control vibration
frequency setting
Hz
Used to set the value of the after-changing vibration
suppression control vibration frequency setting.
PB34 VRF2B
Gain changing vibration
suppression control resonance
frequency setting
Hz
Used to set the value of the after-changing vibration
suppression control resonance frequency setting.