



















5 - 21
5. OPERATION
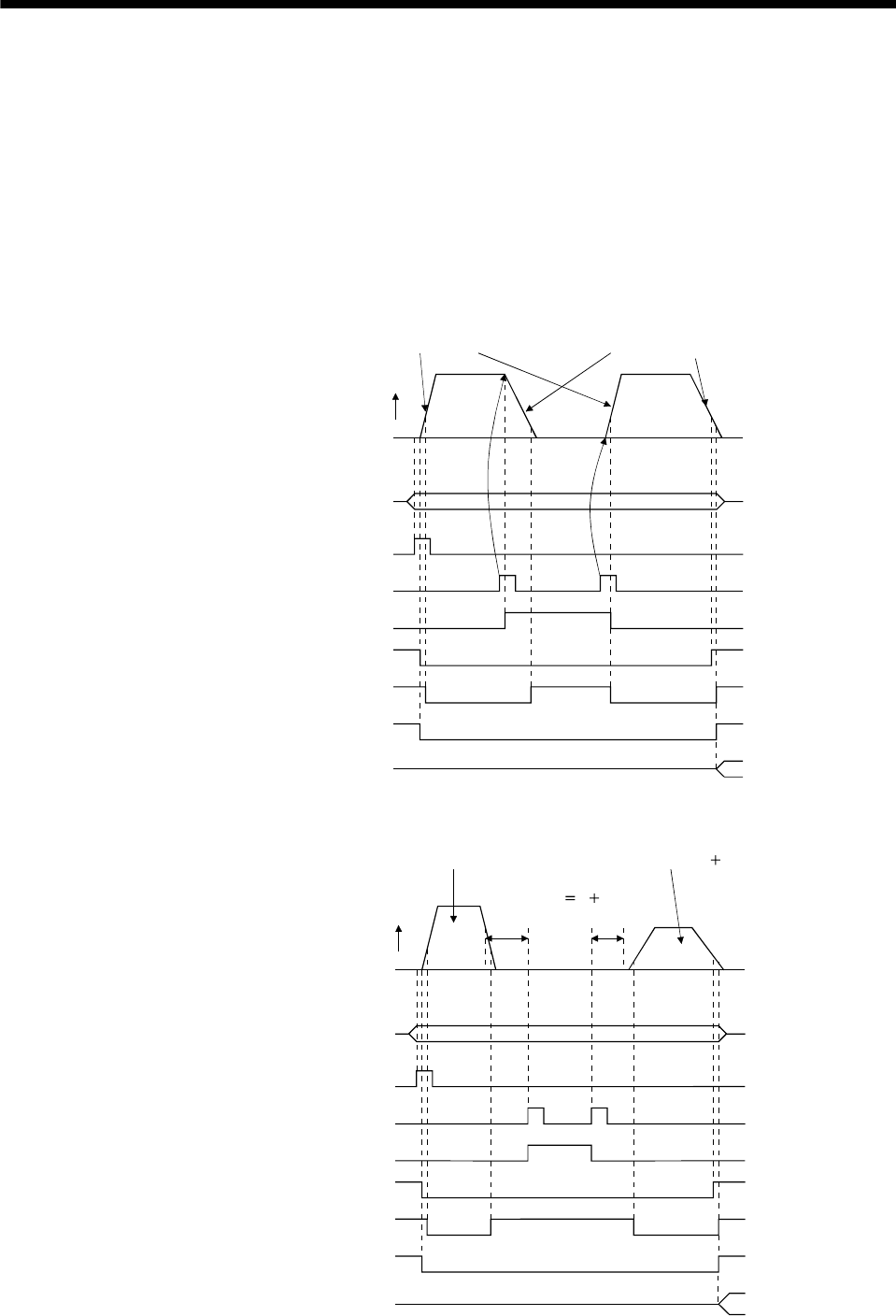
(c) Temporary stop/restart
When RYn7 is turned ON during automatic operation, the motor is decelerated to a temporary stop at
the deceleration time constant in the point table being executed. When RYn7 is turned ON again, the
remaining distance is executed.
If the forward/reverse rotation start signal (RYn1 or RYn2) is ignored if it is switched on during a
temporary stop.
The remaining moving distance is cleared when the operation mode is changed from the automatic
mode to the manual mode during a temporary stop.
The temporary stop/restart input is ignored during zeroing and jog operation.
1) When the servo motor is rotating
ON
OFF
ON
OFF
ON
OFF
0r/min
OFF
OFF
ON
ON
OFF
ON
Forward
rotation
Servo motor speed
Point table
Forward rotation start (RYn1)
or reverse rotation start (RYn2)
Temporary stop/Restart (RYn7)
Temporary stop (RXn7)
Rough match (RXn2)
In position (RXn1)
Remaining
distance
Point table No. out put
(RX(n+2)2 to RX(n+2)9)
No.n
Acceleration time constant
of point table No.n
Deceleration time constant
of point table No.n
No.n
Movement completion (RXnC)
2) During dwell
Dwell ta tb
ON
OFF
ON
OFF
ON
OFF
0r/min
OFF
OFF
ON
ON
ta tb
OFF
ON
Forward
rotation
Servo motor speed
Point table
Forward rotation start (RYn1)
or reverse rotation start (RYn2)
Temporary stop/Restart (RYn7)
Temporary stop (RXn7)
Rough match (RXn2)
In position (RXn1)
No.n
Point table No. out put
(RX(n+2)2 to RX(n+2)9)
Point table No.n
Point table No.n 1
No.n
Movement completion (RXnC)