

















16 - 9
16. INDEXER POSITIONING OPERATION
Device No.
Signal name
(Device name)
Description
1 station
occupied
2 stations
occupied
Remarks
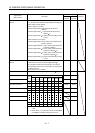
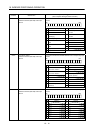
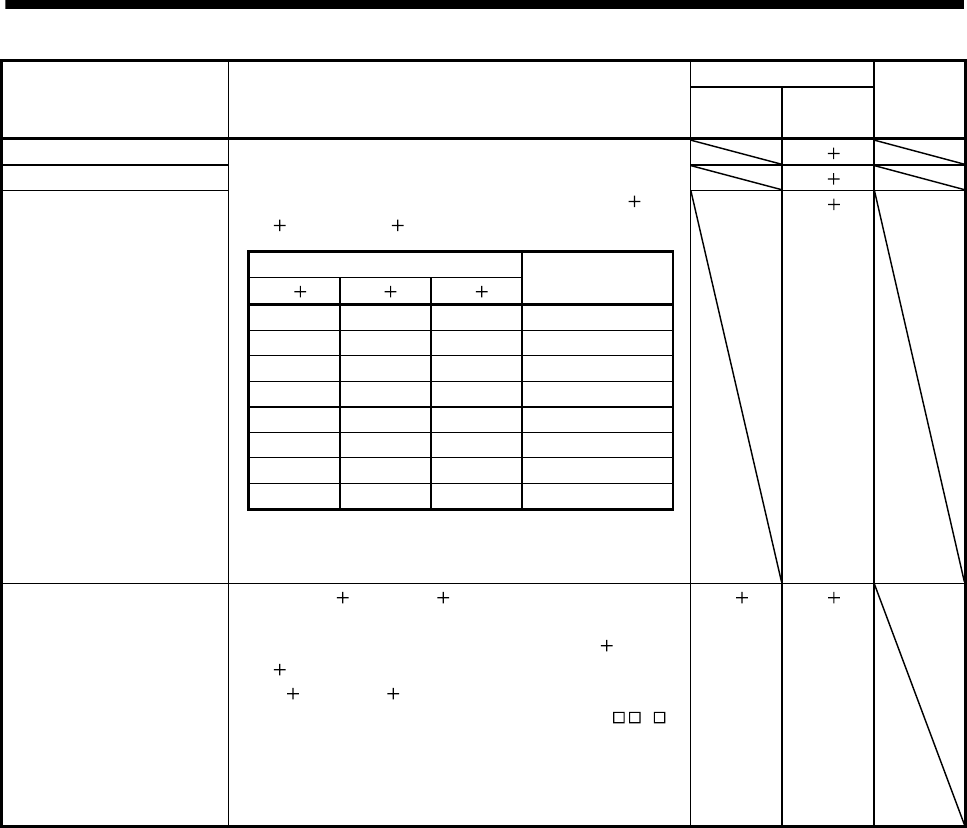
Speed selection 1 RY(n 2)C
Speed selection 2 RY(n 2)D
Speed selection 3
Set the servo motor speed, acceleration time constant, and
deceleration time constant for positioning operation by
selecting the point table number from 1 to 8 using RY(n
2)C,
RY(n
2)D, and RY(n 2)E.
RY(n 2)E
(Note) Remoto input
RY(n 2)E RY(n 2)D RY(n 2)C
Point table No.
0 0 0 1
0 0 1 2
0 1 0 3
0 1 1 4
1 0 0 5
1 0 1 6
1 1 0 7
1 1 1 8
Note. 0: OFF
1: ON
Reset Keeping RY(n 1)A or RY(n 3)A ON for 50ms or longer
allows an alarm to be deactivated.
Some alarms cannot be deactivated by Reset RY(n
1)A or
RY(n
3)A. (Refer to section 16.12.4 (1))
If RY(n
1)A or RY(n 3)A is turned ON with no alarm
occurring, the base circuit will not be shut off. When "
1 "
is set in parameter No.PD20 (function selection D-1), the base
circuit is shut off.
This device is not designed to make a stop. Do not turn it ON
during operation.
RY(n
1)A RY(n 3)A