


















16 - 91
16. INDEXER POSITIONING OPERATION
No. Symbol Name and function Initial value Unit Setting range
PC29 For manufacturer setting
Do not change this value by any means.
0000h
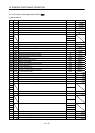
PC30 *DSS Remote register-based position/speed specifying system selection
This parameter is made valid when Position/speed specification selection
(RY(n
2)A) is turned ON with 2 stations occupied. Select how to receive the
position command and speed command.
When 1 station is occupied, selection of "0001" or "0002" will result in a
parameter error.
1
Set value
0
Specify the servo motor
speed. (Note)
Set the station No.
Position command
Speed command
Specify the servo point
table No.
000
Note. In the case, always set the acceleration/deceleration time constant in
the point table No.1.
0000h Refer to
name and
function
column.
PC31 Not used in indexer positioning operation. 0
PC32 Do not change the parameter.
PC33 0
PC34
PC35 TL2 Internal torque limit 2
Set this parameter to limit servo motor torque on the assumption that the
maximum torque is 100[%].
When 0 is set, torque is not produced.
100.0 % 0
to
100.0
PC36 For manufacturer setting
Do not change this value by any means.
0000h
PC37 Not used in indexer positioning operation. 0
PC38 Do not change the parameter.
PC39 0
PC40
PC41 For manufacturer setting 0000h
PC42 Do not change this value by any means. 0000h
PC43 0000h
PC44
0000h
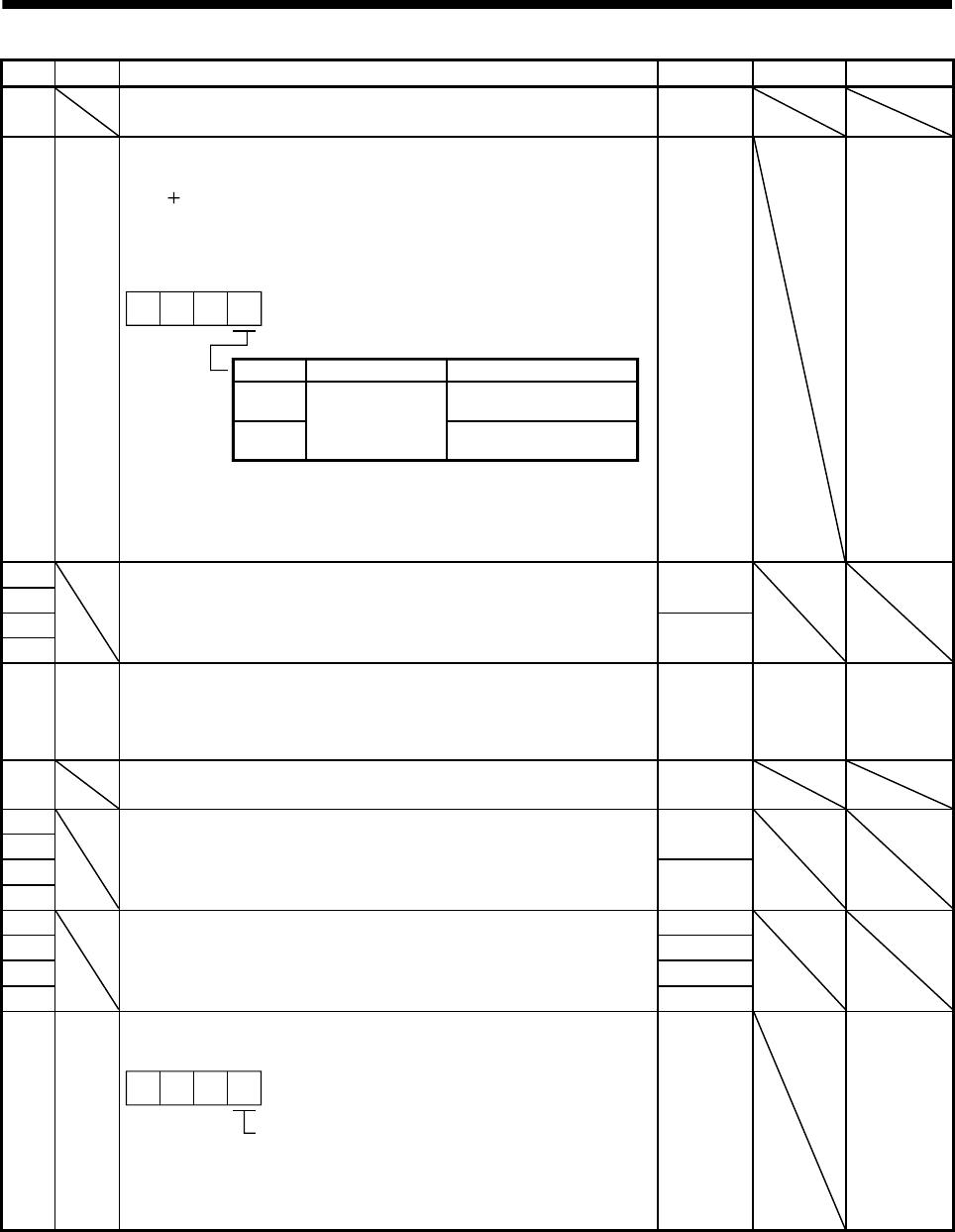
PC45 *COP9 Function selection C-9
Select the manual operation mode.
Manual operation for indexer positioning operation
selection (Refer to section 16.7.3)
0: Indexer JOG operation
1: JOG operation
000
0000h 0000h
to
0001h