


















16 - 89
16. INDEXER POSITIONING OPERATION
No. Symbol Name and function Initial value Unit Setting range
PC13 Not used in indexer positioning operation.
Do not change the parameter.
0
PC14 *BKC Backlash compensation
Used to set the backlash compensation made when the command
direction is reversed.
This function compensates for the number of backlash pulses in the
opposite direction to the home position return direction.
For the home position ignorance (servo-on position as home position), this
function compensates for the number of backlash pulses in the opposite
direction to the first rotating direction after establishing the home position
by switching ON the servo-on (RYn0).
In the absolute position detection system, this function compensates for
the backlash pulse count in the direction opposite to the operating direction
at power-on.
0 pulse 0
to
32000
PC15 For manufacturer setting
Do not change this value by any means.
0000h
PC16 MBR Electromagnetic brake sequence output
Used to set the delay time (Tb) between when the electromagnetic brake
interlock (MBR) switches off and when the base circuit is shut off.
100 ms 0
to
1000
PC17 Not used in indexer positioning operation.
Do not change the parameter.
50
PC18 *BPS Alarm history clear
Used to clear the alarm history.
Alarm history clear
0: Invalid
1: Valid
When alarm history clear is made valid,
the alarm history is cleared at next power-on.
After the alarm history is cleared, the setting
is automatically made invalid (reset to 0).
000
0000h Refer to
name and
function
column.
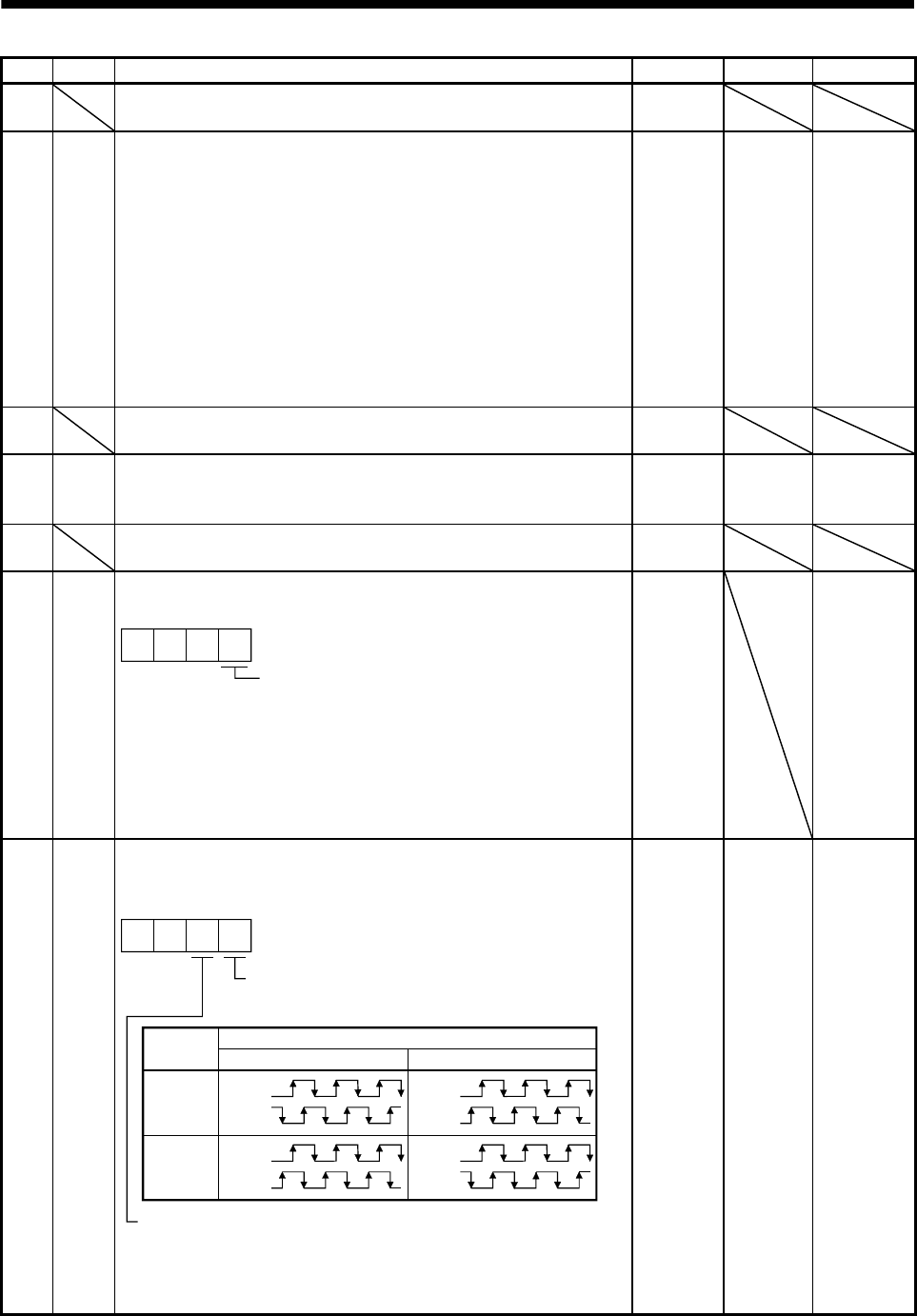
PC19 *ENRS Encoder output pulse selection
Use to select the, encoder output pulse direction and encoder output pulse
setting.
00
A-phase
B-phase
A-phase
B-phase
A-phase
B-phase
A-phase
B-phase
Encoder output pulse phase changing
Changes the phases of A, B-phase encoder pulses
output .
Encoder output pulse setting selection (refer to parameter No.PA15).
0: Output pulse designation
1: Division ratio setting
2: Outputs the encoder pulse without processing it.
Servo motor rotation direction
Set value
CCW CW
0
1
0000h Refer to
name and
function
column.