



















App. - 28
A
PPENDI
X
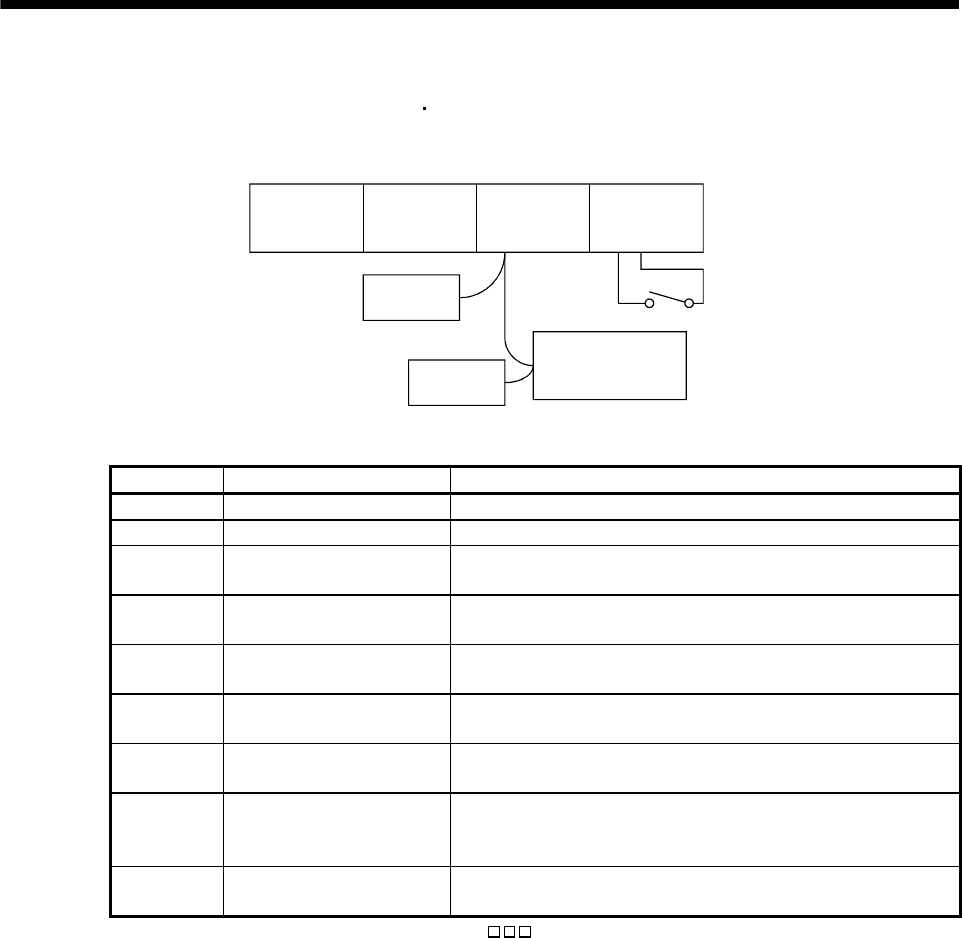
App. 8.2.3 System configuration example when 2 stations are occupied
As shown below, the CC-Link system master
local unit is loaded to run one servo amplifiers (2 station
occupied).
Input module
A1SX40
(X20 to X2F)
Master station
A1SJ61BT11
(X/Y00 to 1F)
CPU
A1SHCPU
Power supply
A1S62PN
Programmable controller
Servo amplifier
(2 stations occupied)
Station No.1
Terminating
resistor
X20 to X28
Terminating
resistor
Input signal assignment
Input signal Signal name General operation when the input is on
X20 Reset command Resets the servo amplifier on an occurrence of a servo alarm.
X21 Servo-on command Turns on the servo motor. (Servo-on status)
X22
Forward rotation JOG
command
Executes a forward JOG operation in the manual operation mode.
X23
Reverse rotation JOG
command
Executes a reverse JOG operation in the manual operation mode.
X24 Automatic/manual selection
OFF: Manual operation mode
ON: Automatic operation mode
X25
Home position return
command
Executes a dog type home position return when home position return
is incomplete in the automatic operation mode.
X26 Proximity dog command
OFF: Proximity dog is on. (Note)
ON: Proximity dog is off.
X27 Positioning start command
Executes a positioning operation with position and speed settings
specified in the remote register when home position return is
completed in the automatic operation mode.
X28
Position/speed setting system
changing command
Changes to position/speed specification by the remote register.
Note. This is when the parameter No.PD16 is set to " 0 (initial value)" (detects the dog at off).