

















16 - 81
16. INDEXER POSITIONING OPERATION
No. Symbol Name and function Initial value Unit
Setting
range
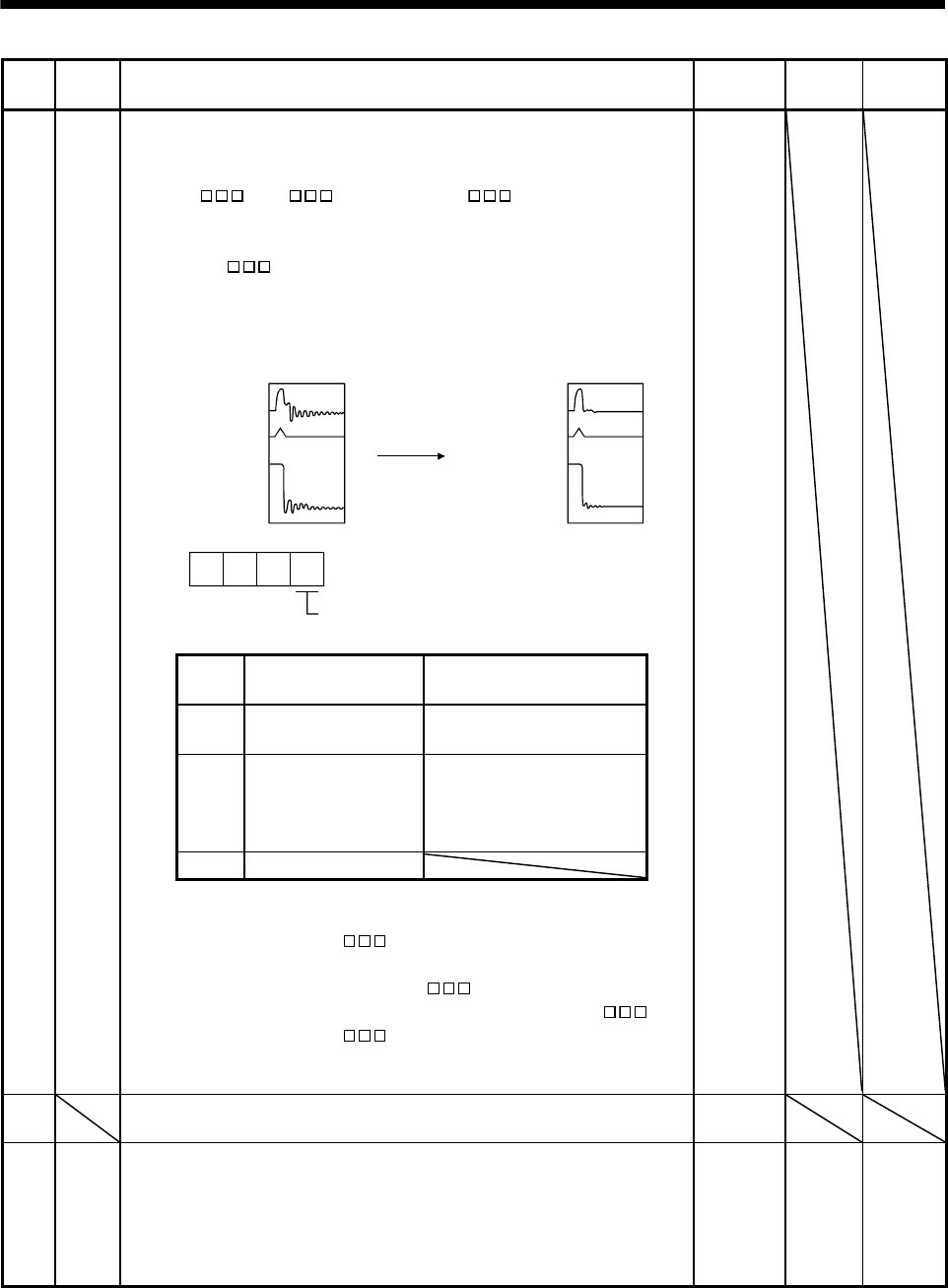
PB02 VRFT Vibration suppression control tuning mode (Advanced vibration suppression
control)
The vibration suppression is valid when the parameter No.PA08 (auto tuning)
setting is "
2" or " 3". When PA08 is " 1", vibration suppression
is always invalid.
Select the setting method for vibration suppression control tuning. Setting this
parameter to "
1" (vibration suppression control tuning mode)
automatically changes the vibration suppression control vibration frequency
(parameter No.PB19) and vibration suppression control resonance frequency
(parameter No.PB20) after positioning is done the predetermined number of
times.
Droop pulse
Command
Automatic
adjustment
Droop pulse
Command
Machine side
position
Machine side
position
Vibration suppression control tuning mode
000
0000h
Setting
Vibration suppression
control tuning mode
Automatically set parameter
0
Vibration suppression
control OFF
(Note)
1
Vibration suppression
control tuning mode
(Advanced vibration
suppression control)
Parameter No.PB19
Parameter No.PB20
2 Manual mode
Note. Parameter No.PB19 and PB20 are fixed to the initial values.
When this parameter is set to "
1", the tuning is completed after
positioning is done the predetermined number or times for the predetermined
period of time, and the setting changes to "
2". When the vibration
suppression control tuning is not necessary, the setting changes to "
0".
When this parameter is set to "
0", the initial values are set to the vibration
suppression control - vibration frequency and vibration suppression control -
resonance frequency. However, this does not occur when the servo off.
PB03 For manufacturer setting
Do not change this value by any means.
0000h
PB04 FFC Feed forward gain
Set the feed forward gain. When the setting is 100%, the droop pulses during
operation at constant speed are nearly zero. However, sudden
acceleration/deceleration will increase the overshoot. As a guideline, when the
feed forward gain setting is 100%, set 1s or more as the
acceleration/deceleration time constant up to the rated speed.
0 % 0
to
100