



















16 - 63
16. INDEXER POSITIONING OPERATION
16.9.2 Torque limit changing dog type home position return
A home position return method using a proximity dog. With deceleration started at the front end of the proximity
dog, the position where the first Z-phase signal is given past the rear end of the dog or a motion has been
made over the home position shift distance starting from the Z-phase signal is defined as a home position. A
limit can be put on the servo motor torque at home position return execution and at stop separately.
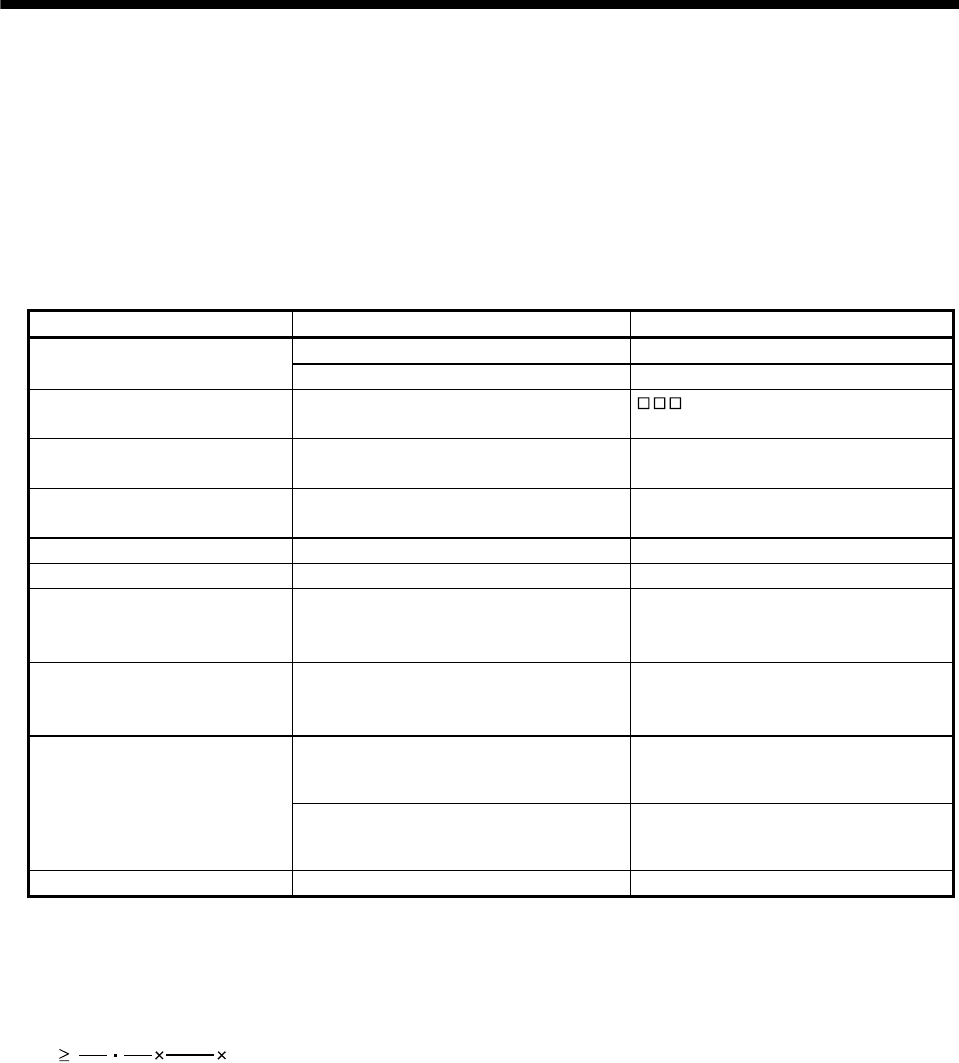
(1) Devices, parameters
Set the input devices and parameters as follows.
Item Device/Parameter used Description
Operation mode selection 1 (RYn6) Turn off RYn6. Home position return mode
selection
Operation mode selection 2 (RYn7) Turn off RYn7.
Torque limit changing dog type
home position return
Parameter No.PC02
C: Torque limit changing dog type
home position return is selected.
Home position return direction Parameter No.PC03
Refer to section 16.9.1 (2) and choose
home position return direction.
Dog input polarity Parameter No.PD16
Refer to section 16.9.1 (2) and choose dog
input polarity.
Home position return speed Parameter No.PC04 Set speed until detection of dog.
Creep speed Parameter No.PC05 Set speed after detection of dog.
Home position shift distance Parameter No.PC06
Set when shifting the home position starting
at the first Z-phase signal after passage of
proximity dog rear end.
Home position return
acceleration/deceleration time
constants
Point table No.1
Use the acceleration/deceleration time
constants of point table No.1.
Point table No.PA11
Set the torque limit value for the forward
rotation direction at home position return
execution.
Torque limit value at home position
return execution
Point table No.PA12
Set the torque limit value for the reverse
rotation direction at home position return
execution.
Torque limit value at stop Point table No.PC35
Set the torque limit value at stop.
(2) Length of proximity dog
Adjust the length of proximity dog or home position return speed so that the servo motor speed reaches to
the creep speed while detecting the proximity dog (DOG).
CMX
L
1
60
V
2
td
CDV
360
L
1
: Angle that proximity dog holds on the circumference of machine side [degree]
V : Home position return speed of motor side [r/min]
td : Deceleration time of motor side [s]