



















1 - 10
1. FUNCTIONS AND CONFIGURATION
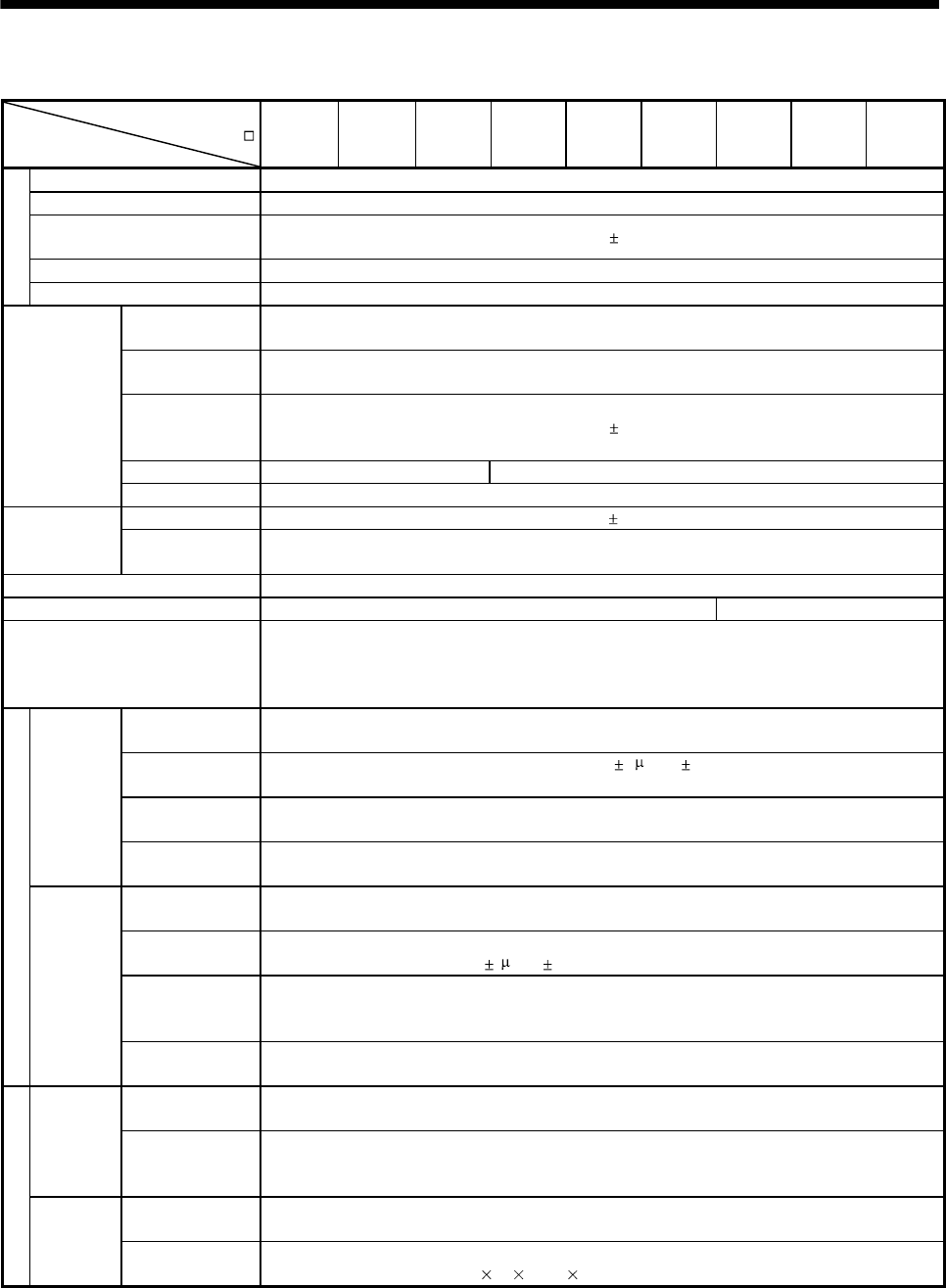
(2) 400V class
Servo amplifier
MR-J3-
Item
60T4 100T4 200T4 350T4 500T4 700T4 11KT4 15KT4 22KT4
Voltage/frequency 3-phase 380 to 480VAC, 50/60Hz
Permissible voltage fluctuation 3-phase 323 to 528VAC
Permissible frequency
fluctuation
Within
5%
Power supply capacity Refer to section 13.2
Power supply
Inrush current Refer to section 13.5
Voltage,
frequency
1-phase 380 to 480VAC, 50/60Hz
Permissible
voltage fluctuation
1-phase 323 to 528VAC
Permissible
frequency
fluctuation
Within
5%
Input 30W 45W
Control circuit
power supply
Inrush current Refer to section 13.5
Voltage 24VDC 10%
Interface power
supply
Power supply
capacity
(Note) 150mA
Control System Sine-wave PWM control, current control system
Dynamic brake Built-in External option
Protective functions
Overcurrent shut-off, regenerative overvoltage shut-off, overload shut-off (electronic thermal relay),
servo motor overheat protection, encoder error protection, regenerative brake error protection,
undervoltage, instantaneous power failure protection, overspeed protection, excessive error
protection
Operational
specifications
Positioning by specifying the point table No. (255 points)
Position command
input
Set in point table. 1-point feed length setting range: 1[ m] to 999.999[mm]
Speed command
input
Set in point table. Acceleration/deceleration time is set in point table.
S-pattern acceleration/deceleration time constant is set in parameter No.PC13.
Point table
number
input
System
Signed absolute value command system, incremental value command system, signed absolute
value command/incremental value command specifying system
Operational
specifications
Remote register setting is used for positioning.
Position command
input
Remote register is used to set position command data.
Feed length input setting range:
1 m to 999.999m
Speed command
input
Remote register is used to make selection from point table.
Remote register is used to set speed command data (speed).
S-pattern acceleration/deceleration time constant is set in parameter No.PC13.
Command system
Position
command
data input
(when 2
stations are
occupied)
System
Signed absolute value command system, incremental value command system, signed absolute
value command/incremental value command specifying system
Point table
Point table number input, position data input system
Positioning operation is performed once in accordance with the position and speed commands.
Automatic
operation
mode
Automatic
continuous
operation
Varied speed operation (2 to 255 speeds), automatic continuous positioning operation (2 to 255
points)
Jog
Jog operation is performed in accordance with the parameter-set speed command by contact input
or through CC-Link communication function.
Operation mode
Manual
operation
mode
Manual pulse
generator
Manual feed is made by manual pulse generator.
Command pulse multiplication:
1, 10 or 100 is selected using parameter.