



















5 - 46
5. OPERATION
5.6.9 Dog cradle type home position return
The position where the first Z-phase signal is issued after detection of the proximity dog front end can be
defined as a home position.
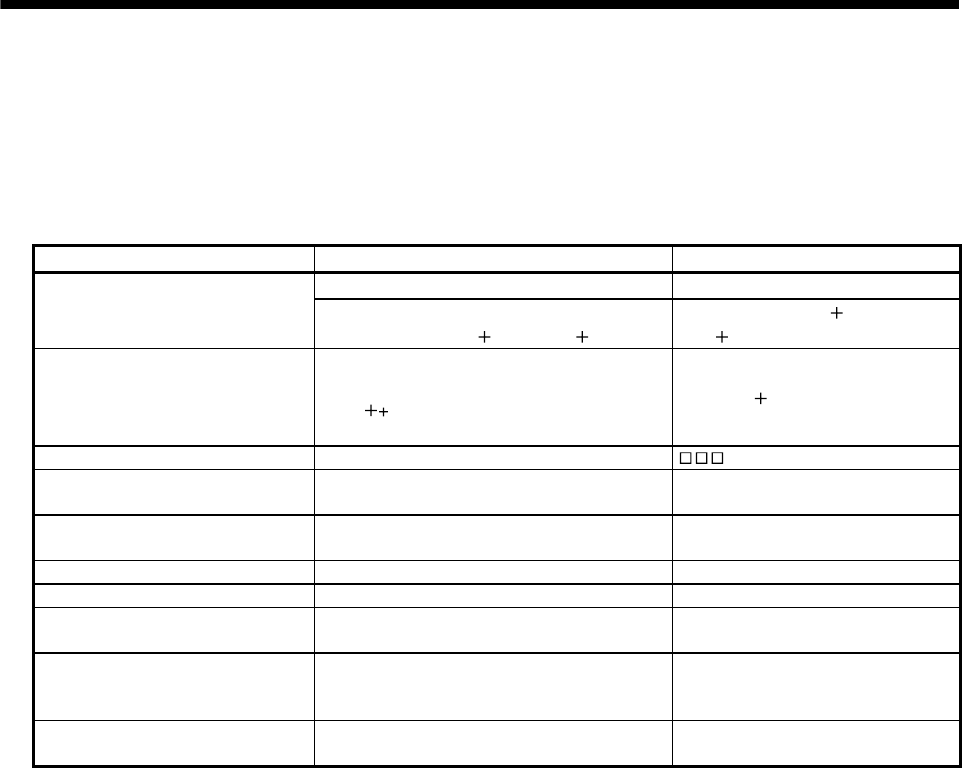
(1) Devices, parameters
Set the input devices and parameters as indicated below.
Item Device/Parameter used Description
Automatic/manual selection (RYn6) Turn RYn6 ON.
Manual home position return mode
selection
Point table No. selection 1 to 8
(RYnA to RYnE, RY(n
2)3 to RY(n 2)5)
RYnA to RYnE, RY(n
2)3 to
RY(n
2)5 are turned off.
Remote register-based
position/speed setting
(Only when two stations are
occupied)
Position/speed specifying system selection
(RY(n
2)A)
Turn RY(n
2)A ON.
Dog cradle type home position return Parameter No.PC02 7: Select the dog cradle type.
Home position return direction Parameter No.PC03
Refer to section 5.6.1 (2) and select the
home position return direction.
Dog input polarity Parameter No.PD16
Refer to section 5.6.1 (2) and select the
dog input polarity.
Home position return speed Parameter No.PC04 Set the speed till the dog is detected.
Creep speed Parameter No.PC05 Set the speed after the dog is detected.
Home position shift distance Parameter No.PC06
Set when the home position is moved
from the Z-phase signal position.
Home position return
acceleration/deceleration time
constants
Point table No.1
Use the acceleration/deceleration time
constant of point table No.1.
Home position return position data Parameter No.PC07
Set the current position at home
position return completion.