


















16 - 93
16. INDEXER POSITIONING OPERATION
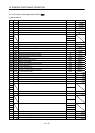
(4) Rough match output
Rough match (RXn2) is output when the command remaining distance reaches the value set in parameter
No.PC11 (rough match output range). The setting range is 0 to 65535 [pulse].
Servo motor
speed
ON
OFF
ON
OFF
Rough match
(RXn2)
In position (RXnC)
Command pulse
Actual servo motor speed
Command remaining distance [pulse]
set in parameter No.PC11
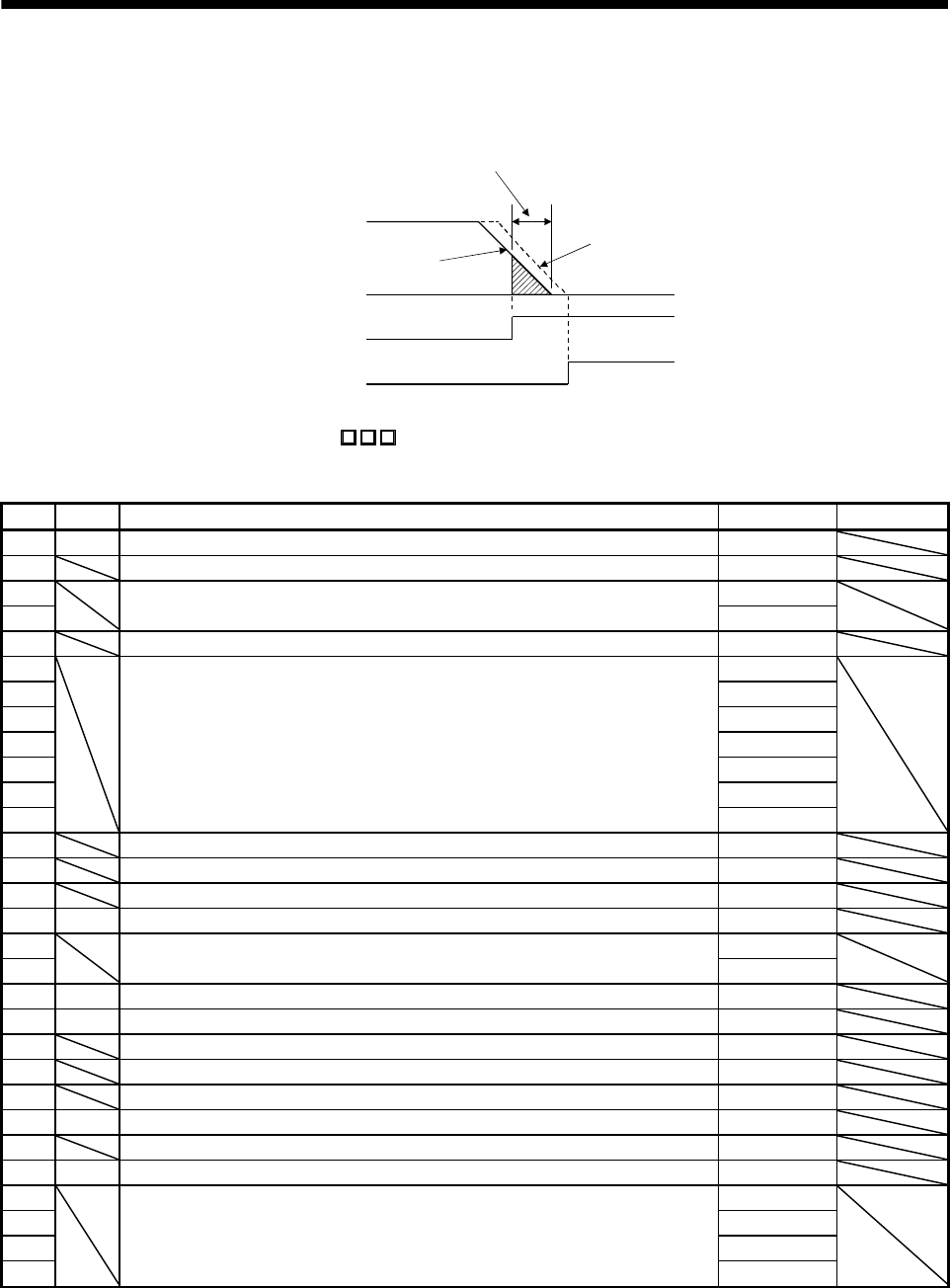
16.11.4 I/O setting parameters (No.PD
)
(1) Parameter list
No. Symbol Name Initial value Unit
PD01 *DIA1 Input signal automatic ON selection 1 0000h
PD02 For manufacturer setting 0000h
PD03 Not used in indexer positioning operation. 0000h
PD04
0000h
PD05 For manufacturer setting 0000h
PD06 Not used in indexer positioning operation. 002Bh
PD07 000Ah
PD08 000Bh
PD09 0002h
PD10 0003h
PD11 0024h
PD12
0C00h
PD13 For manufacturer setting 0000h
PD14 Not used in indexer positioning operation. 0800h
PD15 For manufacturer setting 0000h
PD16 *DIAB Input polarity selection 0000h
PD17 0000h
PD18
For manufacturer setting
0000h
PD19 *DIF Response level setting 0002h
PD20 *DOP1 Function selection D-1 0010h
PD21 For manufacturer setting 0000h
PD22 Not used in indexer positioning operation. 0000h
PD23 For manufacturer setting 0000h
PD24 *DOP5 Function selection D-5 0000h
PD25 For manufacturer setting 0000h
PD26 TLT Indexer positioning operation torque limit delay time 0064h
PD27 For manufacturer setting 0000h
PD28 0000h
PD29 0000h
PD30
0000h