


















3 - 10
3. CC-LINK COMMUNICATION FUNCTIONS
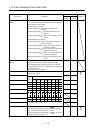
(2) When 2 stations are occupied
RXn/RYn: 64 points each, RWrn/RWwn: 8 points each
Programmable controller Servo amplifier (RYn) Servo amplifier Programmable controller (RXn)
(Note 1)
Device No.
Signal name
Signal
abbreviation
CN6
connector
pin No.
(Note 1)
Device No.
Signal name
Signal
abbreviation
CN6
connector
pin No.
RYn0 Servo-on SON RXn0 Ready RD 14
RYn1 Forward rotation start ST1 RXn1 In position INP
RYn2 Reverse rotation start ST2 RXn2 Rough match CPO
RYn3 Proximity dog DOG 2 RXn3 Home position return completion ZP 16
RYn4 Forward rotation stroke end LSP 3 RXn4 Limiting torque TLC
RYn5 Reverse rotation stroke end LSN 4 RXn5 Reserved
RYn6 Automatic/manual selection MDO RXn6 Electromagnetic brake interlock MBR
RYn7 Temporary stop/Restart TSTP RXn7 Temporary stop PUS
RYn8 Monitor output execution demand MOR RXn8 Monitoring MOF
RYn9
Instruction code execution
demand
COR RXn9
Instruction code execution
completion
COF
RYnA Point table No. selection 1 DI0 RXnA Warning WNG
RYnB Point table No. selection 2 DI1 RXnB Battery warning BWNG
RYnC Point table No. selection 3 DI2 RXnC Movement completion MEND
RYnD Point table No. selection 4 DI3 RXnD Dynamic brake interlock DB
RYnE Point table No. selection 5 DI4 RXnE Position range output POT
RYnF Clear CR RXnF
RY(n 1)0 to Reserved
to Reserved RX(n 1)F
RY(n 1)F
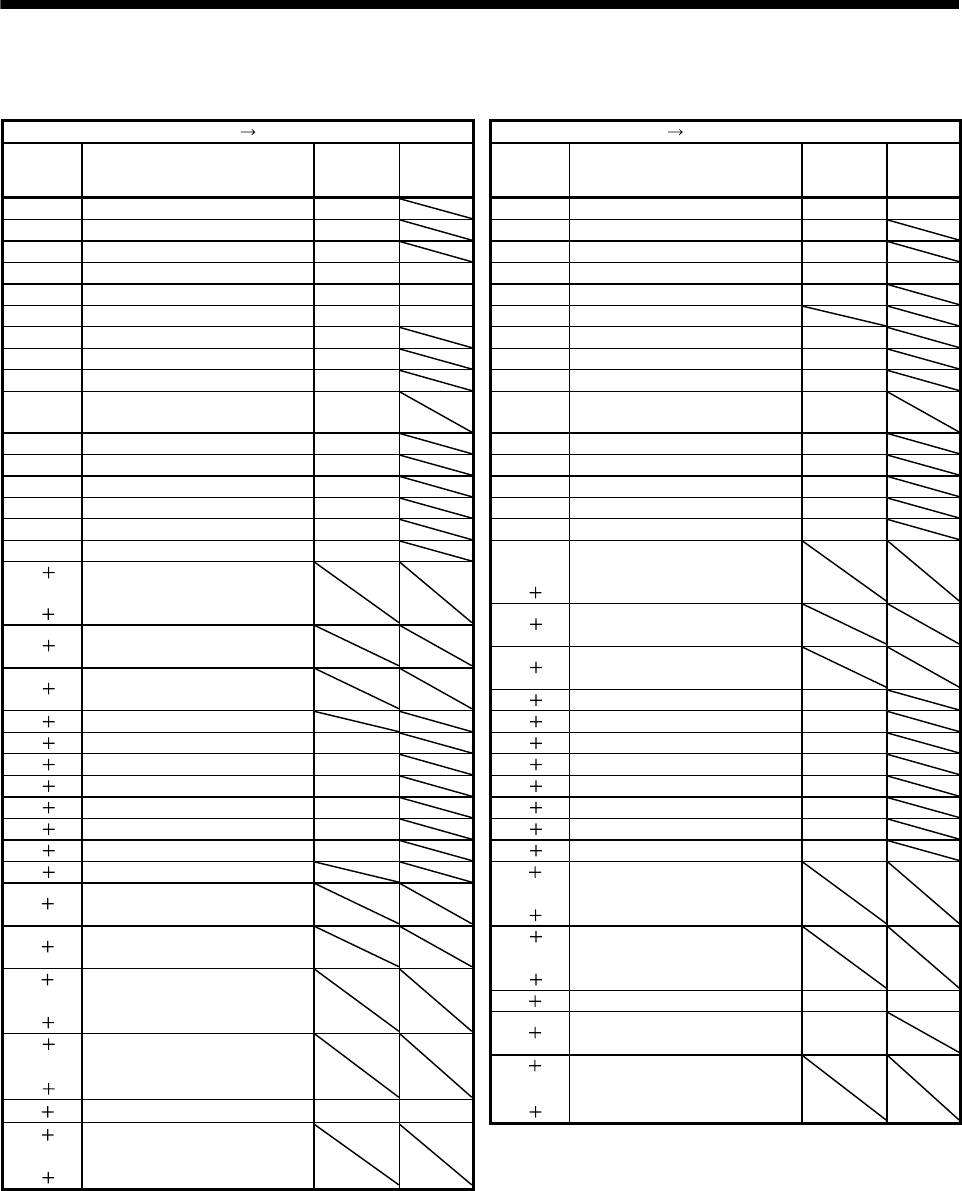
RX(n 2)0
Position instruction execution
completion
RY(n 2)0
Position instruction execution
demand (Note)
RX(n 2)1
Speed instruction execution
completion
RY(n 2)1
Speed instruction execution
demand (Note)
RX(n 2)2 Point table No. output 1 PT0
RY(n 2)2 Reserved RX(n 2)3 Point table No. output 2 PT1
RY(n 2)3 Point table No. selection 6 DI5 RX(n 2)4 Point table No. output 3 PT2
RY(n 2)4 Point table No. selection 7 DI6 RX(n 2)5 Point table No. output 4 PT3
RY(n 2)5 Point table No. selection 8 DI7 RX(n 2)6 Point table No. output 5 PT4
RY(n 2)6 Internal torque limit selection TL1 RX(n 2)7 Point table No. output 6 PT5
RY(n 2)7 Proportion control PC RX(n 2)8 Point table No. output 7 PT6
RY(n 2)8 Gain changing CDP RX(n 2)9 Point table No. output 8 PT7
RY(n 2)9 Reserved RX(n 2)A
to Reserved
RY(n 2)A
Position/speed specifying system
selection
RX(n 2)F
RX(n 3)0
RY(n 2)B
Absolute value/incremental value
selection
to Reserved
RY(n 2)C RX(n 3)9
to Reserved RX(n 3)A Trouble ALM 15
RY(n 2)F
RY(n 3)0
RX(n
3)B
Remote station communication
ready
CRD
to Reserved RX(n 3)C
RY(n 3)9
to Reserved
RY(n 3)A Reset RES RX(n 3)F
RY(n 3)B
to Reserved
RY(n 3)F
Note. "n" depends on the station number setting.