



















16 - 52
16. INDEXER POSITIONING OPERATION
Note 1. Configure a sequence that changes the next station selection (RYnA to RYnE and RY(n 2)3 to RY(n 2)5) and speed
selection (RY(n
2)C to RY(n 2)E) earlier, considering the delay time of CC-Link communication.
2. When the selected station number exceeds the value that is dividing number set in the parameter No.PC46 minus one, the next
station warning (A97) occurs.
3. The start (RYn1) is invalid even if it is turned on during operation. When executing another operation, turn on RYn1 after the
movement completion (RXnC) turns on.
4. Change of the servo motor speed and acceleration/deceleration time constant by the speed selection 1 (RY(n
2)C) to speed
selection 3 (RY(n
2)E) becomes effective when the start (RYn1) turns on. Even if the speed selection 1 to 3 are changed
during servo motor rotation, they do not become effective.
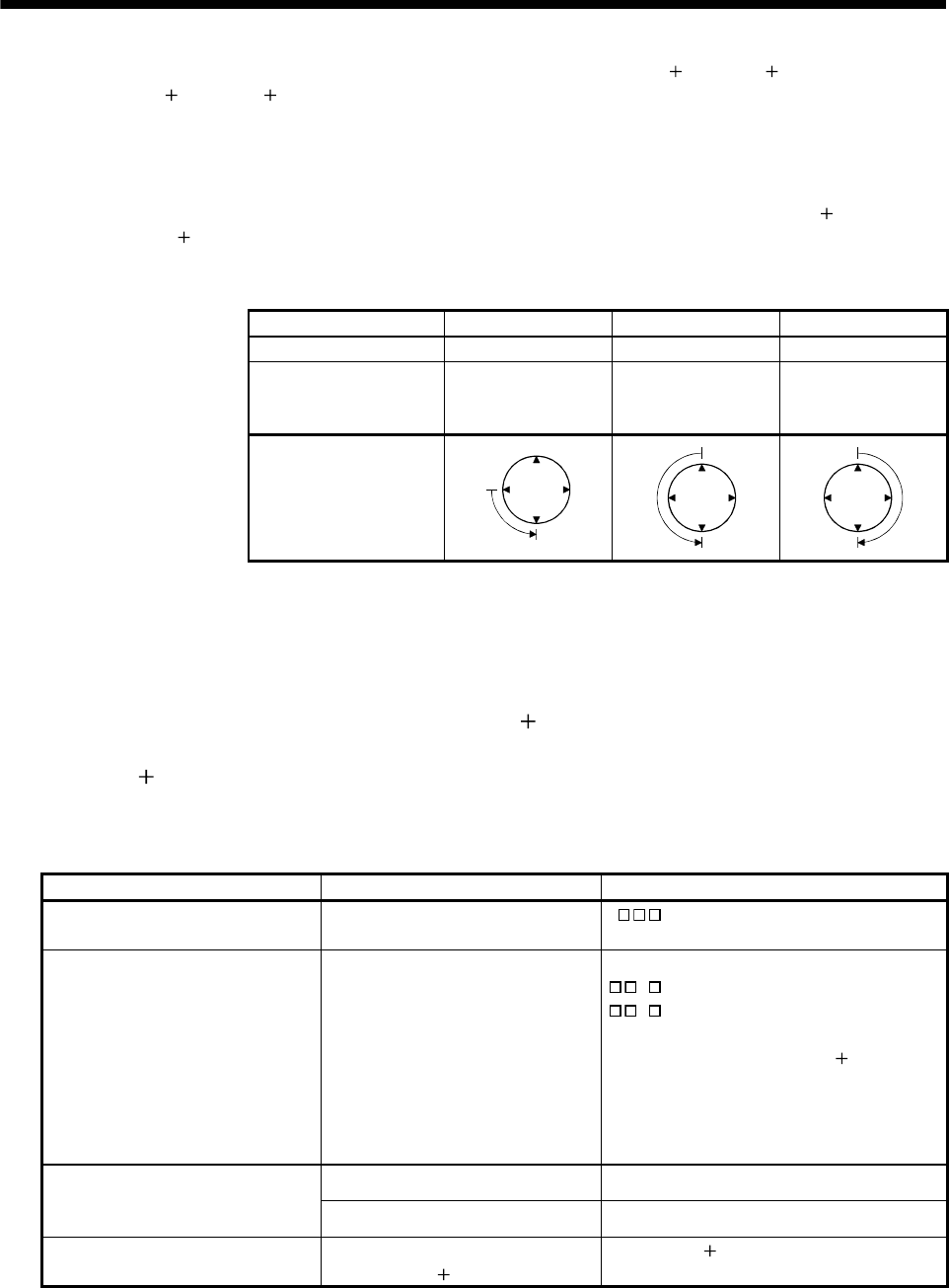
5. The following shows the operation to be executed.
Operation *1 *2 *3
Station No.1 No.3 No.1
Servo motor speed
Acceleration/deceleration
time constant
Point table No.1 Point table No.1 Point table No.2
Positioning
3
0
1
2
0
1
2
3
2
3
0
1
6. Delay time from when RXn1 turns on until the torque limit value changes to the parameter No.PC35 value can be set in the
parameter No.PD26.
7. After power-on, if the current position is with the in-position range of each station, the in position (RXn1) turns on.
(2) When using the remote register
Select the station number using the next station (RWwn
4) remote register and execute positioning. For
the speed data during operation, select the point table number using the point table No./Speed command
data (RWwn
6) remote register, or directly set the servo motor speed.
(a) Device/Parameter
Set the input devices and parameters as indicated below.
Item Device/Parameter Setting description
Indexer positioning operation
selection
Parameter No.PA01 1 : Select the indexer positioning
operation.
Speed data setting method selection Parameter No.PC30 Select the setting method for speed data.
0 : Uses the point table setting value.
1 : Uses the servo motor speed setting
value for the point table No./Speed
command data (RWwn
6) remote
register. In the case, always set the
acceleration/deceleration time
constant in the point table No.1.
(Refer to (2) (c) in this section.)
Operation mode selection 1 (RYn6) Turn on RYn6. Automatic operation mode 2
(Rotation direction specifying indexer)
selection
Operation mode selection 2 (RYn7) Turn on RYn7.
Position/speed specifying system
selection
Position/speed specifying system
selection (RY(n
2)A)
Turn on RY(n
2)A.