


















16 - 1
16. INDEXER POSITIONING OPERATION
16. INDEXER POSITIONING OPERATION
POINT
To execute the indexer positioning operation, parameter needs to be
changed. Set the parameter No.PA01 to "1
".
This chapter provides the indexer positioning operation method using MR-J3-
T servo amplifier. Any matters
not described in this chapter are the same as those of the point table positioning operation. For more
information, refer to chapters up to 15.
16.1 Function
16.1.1 Overview
Using the next station selection 1 (RYnA) to the next station selection 8 (RY(n
2)5) devices, stations from
No.0 to No.254 can be specified.
Settings of servo motor speed and acceleration/deceleration time constant are carried out by specifying the
point table number from 1 to 8 using the speed selection 1 (RY(n
2)C) to the speed selection 3 (RY(n 2)E)
devices. Speed command data can be directly specified by using the remote register when two stations are
occupied.
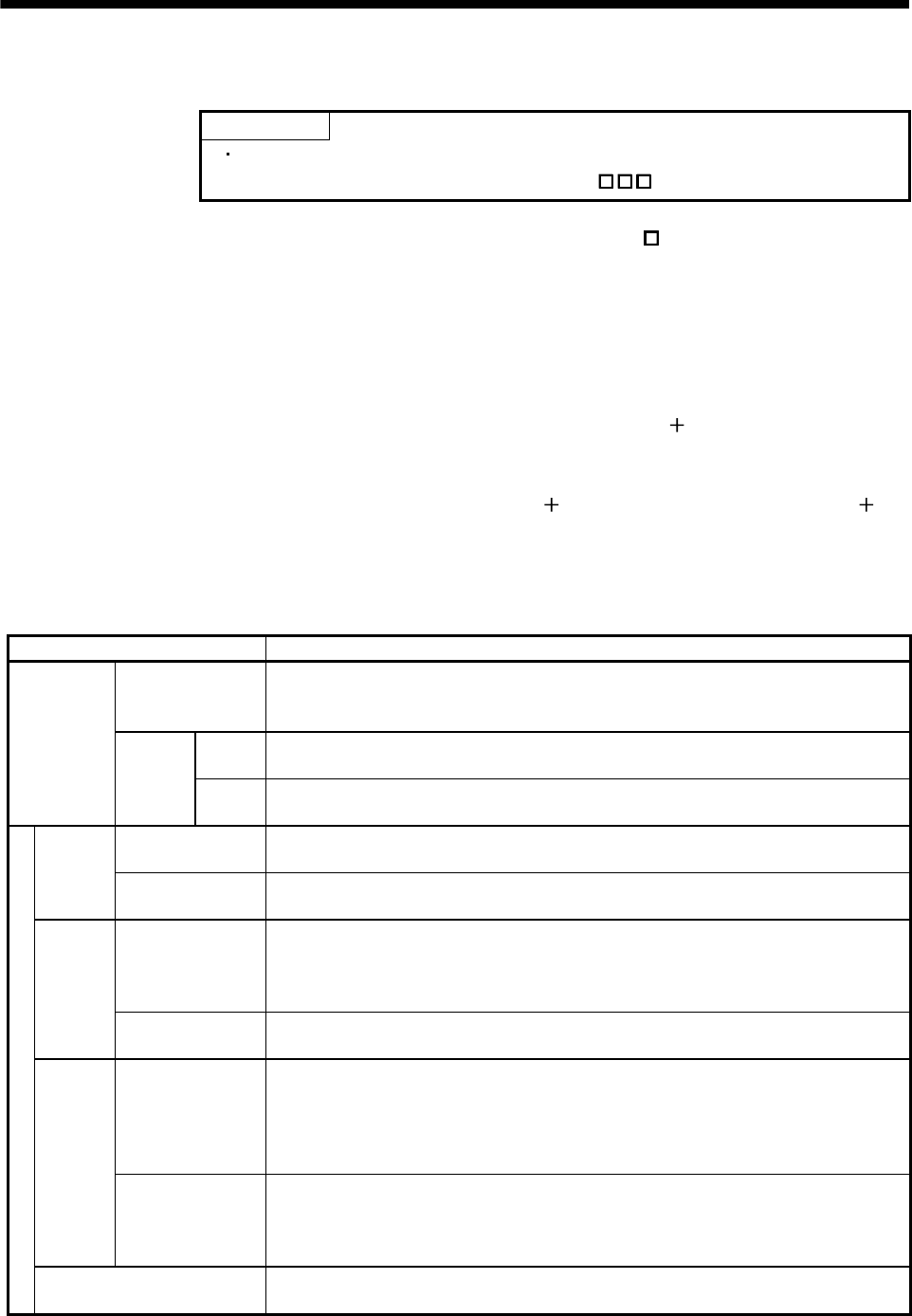
16.1.2 Servo amplifier standard specifications (functions only)
Item Description
Station command
input
Available with CC-Link communication
CC-Link communication (1 station occupied): 31 stations
CC-Link communication (2 stations occupied): 255 stations
Remote
register
Available with CC-Link communication (2 stations occupied)
Set the speed command data (speed) by the remote register.
Command
system
Speed
command
input
Speed
No. input
Select a speed and acceleration/deceleration time constant by the point table
Rotation direction
specifying indexer
Positioning operation is executed to the set station. Rotation direction can be specified.
Automatic
operation
mode
Shortest rotating
indexer
Positioning operation is executed to the set station. The servo motor rotates in the closest
direction from current position.
Indexer JOG
operation
Turning on the start signal (RYn1) makes the servo motor rotate in the direction specified by
the rotation direction specifying.
Turning off the start signal (RYn1) makes the servo motor perform positioning operation to the
closest station where the motor can decelerate to stop.
Manual
operation
mode
JOG operation
In accordance with the speed data set in parameters, JOG operation is performed by using
CC-Link communication
Torque limit
changing dog type
Home position return is performed by the Z-phase pulse count after passing proximity dog.
Home position address may be set. Home position shift distance may be set. Home position
return direction may be selected.
Automatic at-dog home position return return/automatic stroke return function.
Automatic torque limit changing function
Home
position
return
mode
Torque limit
changing data
setting type
Home position return is made without dog.
Home position may be set at any position by manual operation, etc. Home position address may
be set.
Automatic torque limit changing function
Operation mode
Automatic positioning to home
position
High-speed automatic return to a defined home position.