


















4 - 52
4. SIGNALS AND WIRING
4.11.3 Wiring diagrams (HF-MP series
HF-KP series servo motor)
POINT
For HF-SP series HC-RP series HC-UP series HC-LP series servo
motors, refer to section 4.10.2 (2).
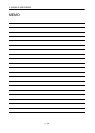
(1) When cable length is 10m or less
AWG20
AWG20
MR-BKS1CBL M-A1-L
MR-BKS1CBL M-A2-L
MR-BKS1CBL M-A1-H
MR-BKS1CBL M-A2-H
(Note 1)
B1
B2
Trouble
(ALM)
Servo motor
10m or less
Forced
stop
(EMG)
24VDC power
supply for
electromagnetic
brake
-
+
(Note 2)
(Note 3)
Electromagnetic
brake (MBR)
Note 1. Connect a surge absorber as close to the servo motor as possible.
2. There is no polarity in electromagnetic brake terminals (B1 and B2).
3. When using a servo motor with an electromagnetic brake, assign the electromagnetic brake interlock (MBR) to external output
signal in the parameters No.PD09 to PD11.
When fabricating the motor brake cable MR-BKS1CBL-
M-H, refer to section 14.1.4.
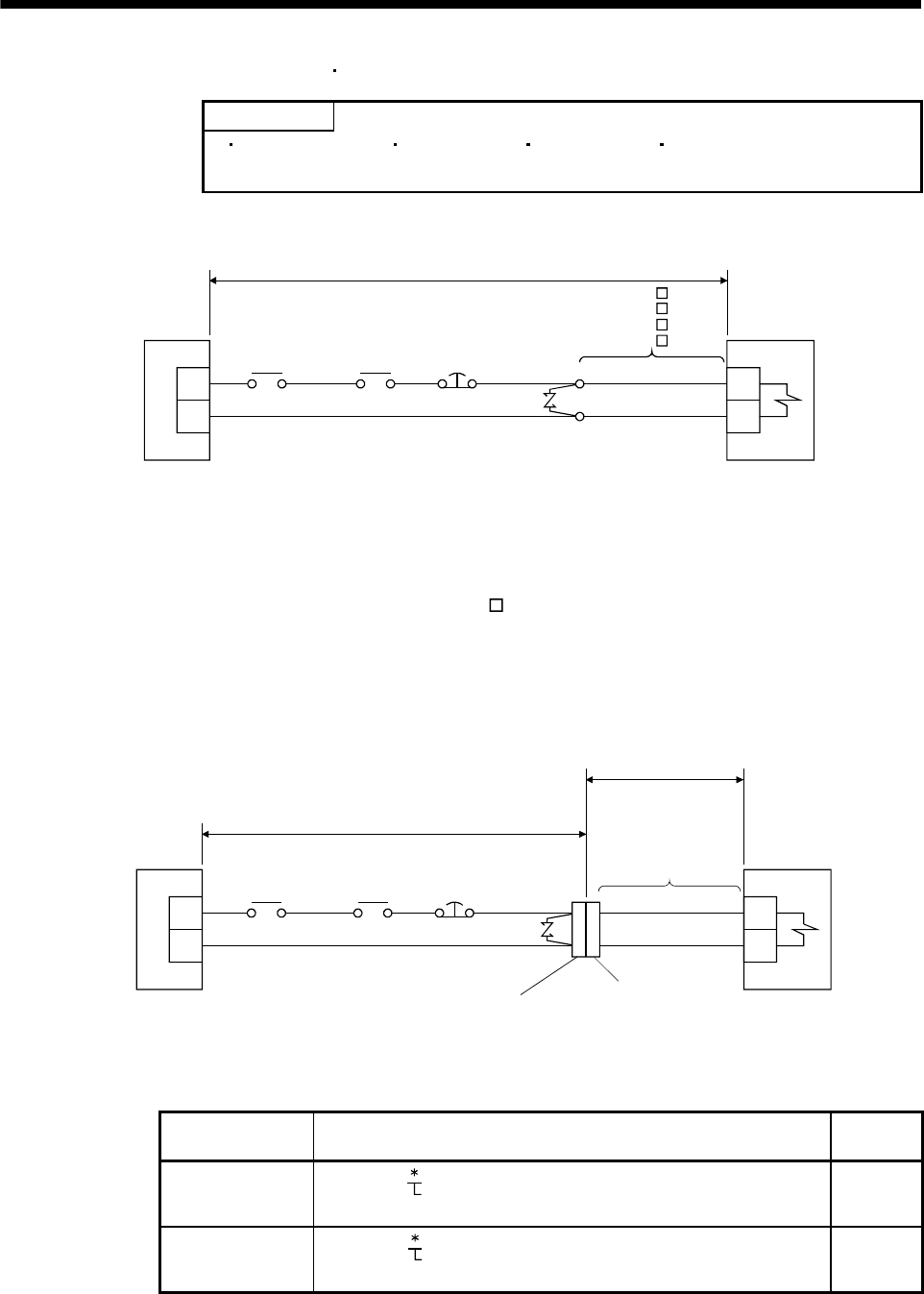
(2) When cable length exceeds 10m
When the cable length exceeds 10m, fabricate an extension cable as shown below on the customer side. In
this case, the motor brake cable should be within 2m long.
Refer to section 14.9 for the wire used for the extension cable.
2m or less
24VDC power
supply for
electromagnetic
brake
AWG20
AWG20
MR-BKS1CBL2M-A1-L
MR-BKS1CBL2M-A2-L
MR-BKS1CBL2M-A1-H
MR-BKS1CBL2M-A2-H
MR-BKS2CBL03M-A1-L
MR-BKS2CBL03M-A2-L
B1
B2
50m or less
Extension cable
(To be fabricated)
Trouble
(ALM)
Forced stop (EMG)
(Note 1)
-
+
(Note 3)
(Note 4)
Electromagnetic
brake (MBR)
Servo motor
(Note 2)
a) Relay connector for
extension cable
(Note 2)
b) Relay connector for motor
brake cable
Note 1. Connect a surge absorber as close to the servo motor as possible.
2. Use of the following connectors is recommended when ingress protection (IP65) is necessary.
Relay connector Description
Protective
structure
a) Relay connector
for extension
cable
CM10-CR2P-
(DDK)
Wire size: S, M, L
IP65
b) Relay connector
for motor brake
cable
CM10-SP2S-
(DDK)
Wire size: S, M, L
IP65
3. There is no polarity in electromagnetic brake terminals (B1 and B2).
4. When using a servo motor with an electromagnetic brake, assign the electromagnetic brake interlock (MBR) to external output
signal in the parameters No.PD09 to PD11.