



















16 - 60
16. INDEXER POSITIONING OPERATION
16.8.2 JOG operation
(1) Setting
Set the devices and parameters as indicated below for the purpose of use. In this case, the next station
selection 1 to 8 (RYnA to RYnE and RY(n
2)3 to RY(n 2)5) and the speed selection 1 to 3 (RY(n 2)C
to RY(n
2)E) are invalid.
Item Device/Parameter Setting description
Indexer positioning operation
selection
Parameter No.PA01
1
: Select the indexer positioning
operation.
Operation mode selection 1 (RYn6) Turn on RYn6
Manual operation mode selection
Operation mode selection 2 (RYn7) Turn off RYn7
JOG operation selection Parameter No.PC45 Set it to " 1".
Station No. direction Parameter No.PA14 Refer to (2) in this section.
JOG speed Point table No.1
The setting is the same as for the indexer JOG
operation. Refer to (2) in section 16.8.1.
Acceleration/deceleration time
constant
Point table No.1
Use the acceleration/deceleration time constant
in the point table No.1.
(2) Operation
Turn on the start (RYn1) to operate the servo motor with the servo motor speed, acceleration time constant,
and deceleration time constant set in the point table No.1. Turning off RYn1 makes the servo motor
decelerate to stop regardless of stations. For the rotation direction, refer to (2) in section 16.8.1.
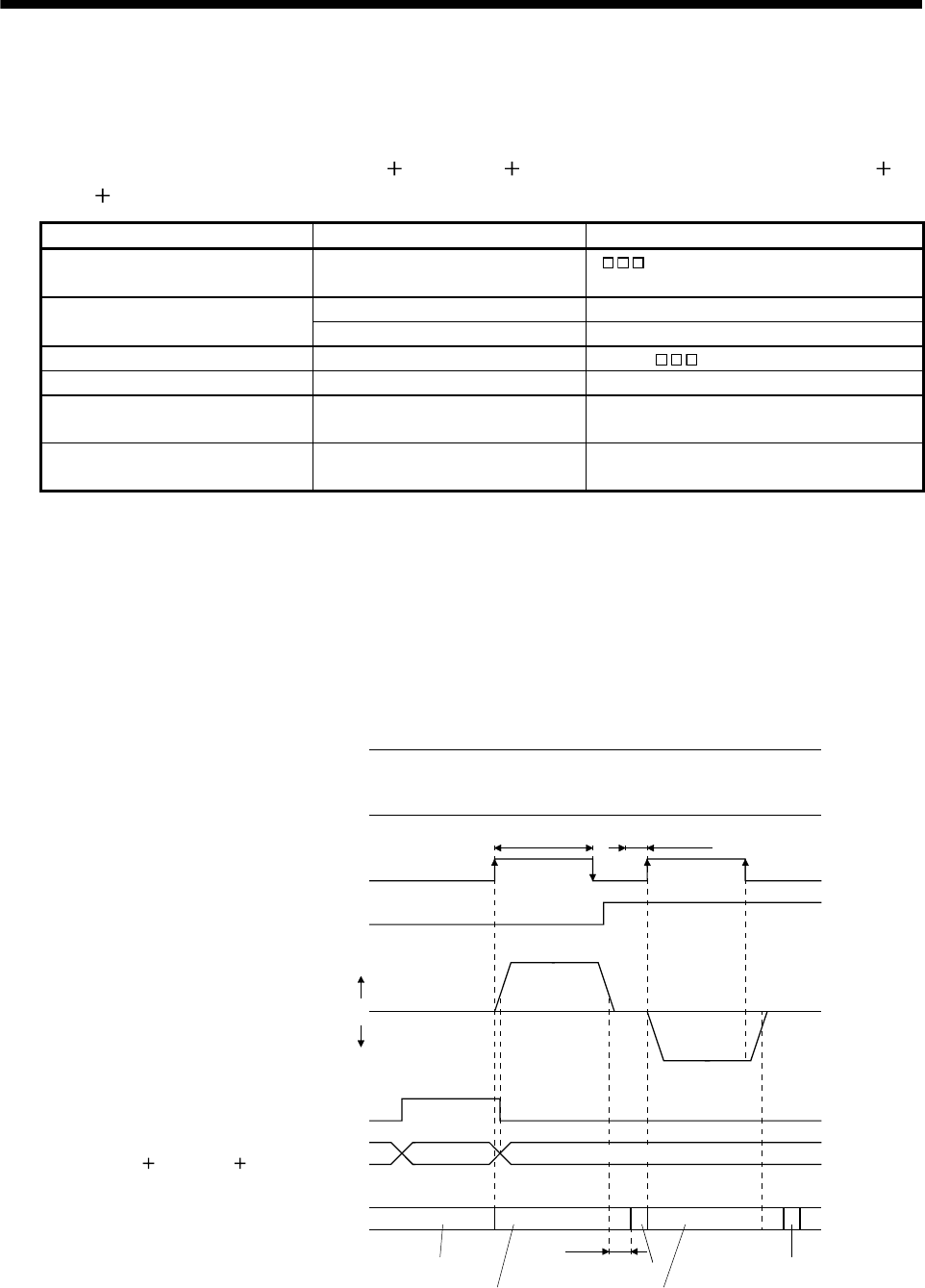
(3) Timing chart
The following timing chart shows an example when executing the indexer JOG operation from the status
where the servo motor is at a stop on the station No.0 when the servo-on is turned on.
6ms or more
(Note)
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
4ms or more
No.0 Out of in-position range
Torque limit value to be effective
Operation mode selection 2
(RYn7)
Operation mode selection 1
(RYn6)
Start (RYn1)
Rotation direction specifying
(RYn2)
Servo motor speed
In position (RXn1)
Parameter No.PA11, PA12
Parameter No.PC35
Parameter No.PA11, PA12
Parameter No.PC35 Parameter No.PC35
Forward
rotation
Reverse
rotation
0r/min
Station output 1 to 8
(RX(n 2)2 to RX(n 2)9)
Note. Torque limit delay time can be set in the parameter No.PD26.