
















7 - 5
7. SPECIAL ADJUSTMENT FUNCTIONS
7.5 Gain changing function
This function can change the gains. You can change between gains during rotation and gains during stop
or can use an external signal to change gains during operation.
7.5.1 Applications
This function is used when:
(1) You want to increase the gains during servo lock but decrease the gains to reduce noise during
rotation.
(2) You want to increase the gains during settling to shorten the stop settling time.
(3) You want to change the gains using an external signal to ensure stability of the servo system since the
load inertia moment ratio varies greatly during a stop (e.g. a large load is mounted on a carrier).
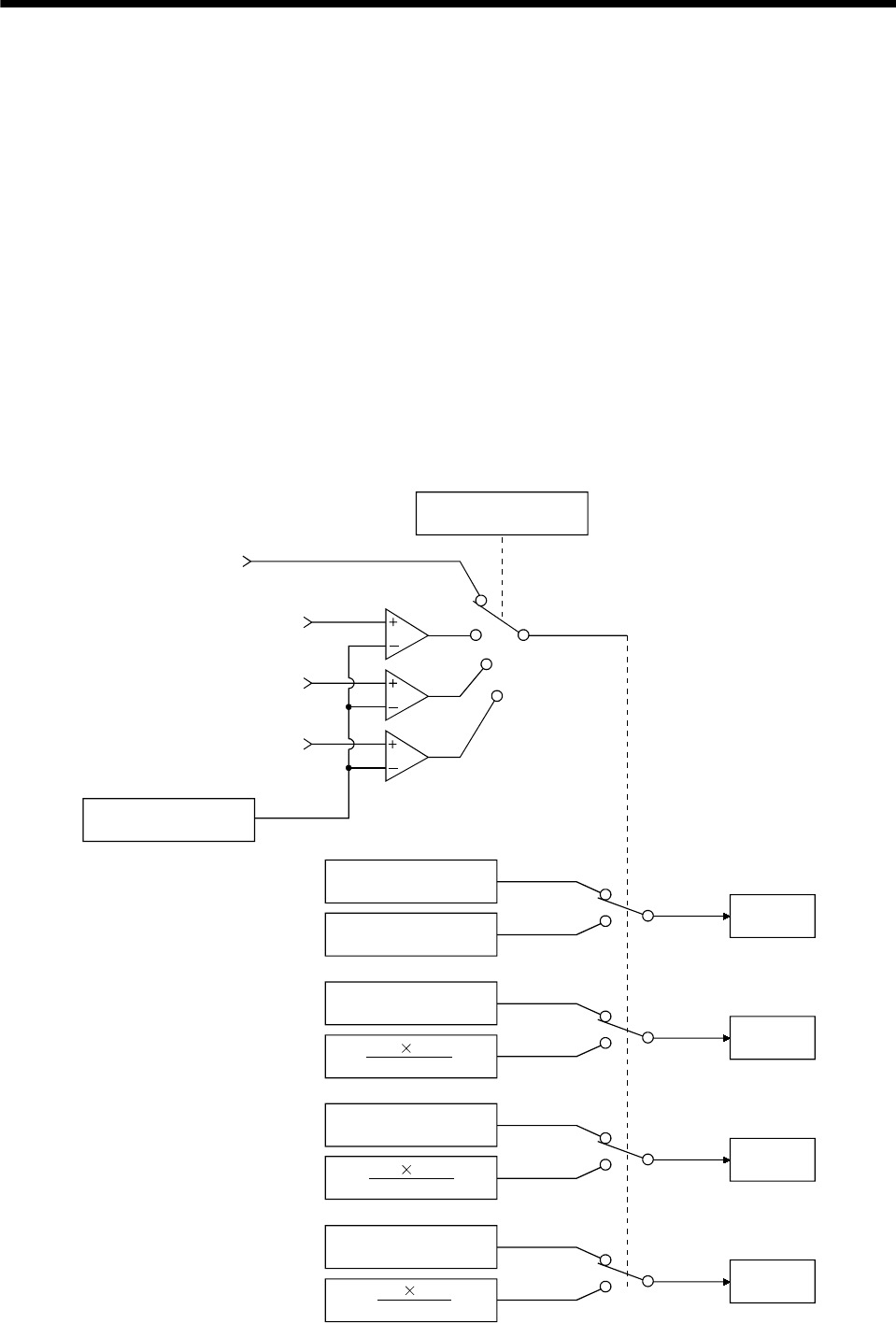
7.5.2 Function block diagram
The valid control gains PG2, VG2, VIC and GD2 of the actual loop are changed according to the conditions
selected by gain changing selection (DRU parameter No. 65) and gain changing condition (DRU
parameter No. 66).
Valid
GD2 value
Command pulse
frequency
Droop pulses
Model speed
External signal
CDP
Comparator
Valid
PG2 value
Valid
VG2 value
Valid
VIC value
Changing
CDP
DRU parameter No.65
CDS
DRU parameter No.66
GD2
DRU parameter No.34
GD2B
DRU parameter No.61
PG2
DRU parameter No.35
PG2 PG2B
100
VG2
DRU parameter No.37
VG2 VG2B
100
VIC
DRU parameter No.38
VIC VICB
100